博文
高速动车组强耦合模型的分布式滑模控制策略
|
引用本文
李中奇, 金柏, 杨辉, 谭畅, 付雅婷. 高速动车组强耦合模型的分布式滑模控制策略. 自动化学报, 2020, 46(3): 495−508 doi: 10.16383/j.aas.190216
Li Zhong-Qi, Jin Bai, Yang Hui, Tan Chang, Fu Ya-Ting. Distributed sliding mode control strategy for high-speed EMU strong coupling model. Acta Automatica Sinica, 2020, 46(3): 495−508 doi: 10.16383/j.aas.190216
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.190216
关键词
高速动车组,强耦合模型,分布式神经网络滑模控制,跟踪控制,数据补偿
摘要
高速动车组是由多节车辆与钩缓装置链接而成的复杂系统. 将钩缓装置等效成弹簧 − 阻尼器系统, 分析动车组运行过程中钩缓装置对相邻车辆作用的动力学机理, 明确作用方式, 建立高速动车组的强耦合模型. 根据列车模型动力或制动力输入的分散特征, 设计分布式神经网络滑模控制策略, 对高速动车组进行速度跟踪控制. 为减小速度跟踪过程中未知因素对高速动车组控制精度的影响, 利用列车历史运行数据, 采用历史工况数据中心对当前控制律输出进行补偿以提高控制精度与实用稳定性. 采用高速动车组运行仿真平台的仿真实验结果表明, 该建模方法较以往多质点模型更能体现高速动车组运行特性, 且采用补偿规则的控制策略优于传统控制效果.
文章导读
列车运行控制系统是高速铁路的关键组成之一, 它直接关系到高速列车的安全稳定运行, 并且研究面向自动驾驶的高速列车自动驾驶技术是未来一段时间内列车运行控制系统的研究方向[1-2]. 由于高速列车动力结构分散, 车辆间由车钩缓冲装置链接而成, 使得运行动力学模型中包含非线性和未知时滞等运行特点, 运行参数难以直接测量, 使得对列车运行过程的精确建模和优化控制提出了更高的要求. 为确保列车安全、准时和经济的运行, 研究高速列车运行过程动力学建模与优化控制方法及其应用研究, 对国内高速列车率先实现自动驾驶具有重要意义.
高速动车组运行时有多种未知变化的不确定因素, 包括未知车钩力、未知时延和未知外界干扰等因素. 根据实际动车组运行过程的控制要求, 众多学者对高速动车组建模方法与控制策略进行了大量的研究, 建立适用于高速动车组的动力学模型和控制方法. 文献[3-5]考虑高速动车组运行过程中的不同线路条件(如弯道、坡道、摩擦等), 不同的天气因素(如强风、顺风等), 分析了对高速动车组动力学模型的量化影响, 建立了优化的列车运行过程动力学模型. 但在长下坡道路或弯道路况条件下, 或者受风力因素影响, 多编组的高速列车前后车辆运行规律一般会不同, 其车钩的链接作用会突显. 对于列车车钩的一些研究, 如文献[6]从列车链接处各部件动力学机理出发建立了纵向 − 垂向耦合模型. 文献[7]分析了列车钩缓系统各部件几何非线性机理, 提出了列车运动时三自由度的计算方法. 结合车钩模型的研究, 文献[8-9]将高速动车组描述成多动力单元结构. 文献[10]进行了二进制微粒群算法下高速列车输入控制力与作用距离的关系的控制方法探究, 同时简要考虑了停车准时条件与能耗条件. 或者有学者直接将列车当作“黑箱”系统, 采用数据驱动的辨识方法进行虚拟参数辨识而得到的模型. 如文献[11]分析了高速动车组Hammerstein模型的静态部分与动态部分, 并用思维进化算法(Mind evolutionary algorithm, MEA)对动态部分进行了误差辨识, 取得了一定的效果. 文献[12]建立了以均方根误差最小, 参数饱和为约束的一阶、二阶、三阶模型, 最后得到了最佳的二阶近似模型. 在考虑改进的建模方法基础上, 一并改进了优化策略与控制算法. 文献[13]在城轨列车一阶运行模型的基础上详细分析了驾驶经验的影响. 文献[14]设计了误差最小的评价指标, 对列车一阶制动系统模型进行了参数辨识. 文献[15]尝试采用极大似然估计法对高速动车组的非线性部分与未知部分进行系数辨识. 文献[16]建立了高速动车组多个局部线性辨识模型. 文献[17]提出了一种利用运行数据驱动的子空间预测模型. 文献[18]在文献[17]基础上考虑了预测模型误差的延时效果, 建立了列车自适应模型. 这些利用数据驱动的虚拟参数建模方法准确率较高, 但主要在于模型的难以解释性, 无法解释其推理过程, 一旦系统发生故障难以进行针对性的改进, 并且重要的是, 不足以应对运行过程中的突发情况.
列车的复杂运行特性也对控制策略提出了较高的要求, 要求既能应对突发情况又能保持良好的跟踪能力. 如文献[19]依据列车牵引动力学计算模型设计了自适应终端滑模控制器. 文献[20]分析了多种优化目标下的高速动车组混合系统模型, 设计了混合系统模型预测控制器(Hybrid system model predictive control, HMPC). 文献[21]对一阶高速动车组延时模型设计了滑模PID组合控制器. 文献[22]提出了针对动车组分布式模型的预测控制器. 文献[23]在文献[22]基础上增加了约束指标, 把高速动车组当作与相邻车辆相关的智能体进行的预测控制器设计. 文献[24]建立了理想与存在干扰两种情况下列车制动过程的动态模型, 设计了基于增广误差的模型参考自适应控制器. 从这些文章中可以看到, 控制方法主要采用单一集中式控制, 对动力分散的高速列车来说, 分布式控制策略会更好分配机车动力[22], 减小车钩的纵向冲动, 保证列车的平稳运行性能.
根据以上研究成果分析, 关于高速列车运行过程建模, 大多研究学者考虑高速列车的运行环境如坡道、隧道、弯道、天气条件等外部条件, 忽略了动车组运行过程中车钩对相邻车辆的作用方式而影响车辆及全车运行动力学特性的本质; 数据驱动的虚拟参数模型有时又不足以应对路况条件的变化. 因此, 考虑基于车钩对相邻车辆的内在作用规律, 从钩缓装置作用的实质出发, 建立揭示内部运动作用规律的高速动车组强耦合模型. 在列车运行速度跟踪控制方面, 采用传统的PID控制器虽有控制算法简单, 运行快速等优点. 但也存在调节频繁、超调大等缺点. 预测控制的效果一般要好于PID控制, 但预测控制计算量大, 实时性差, 很难满足实际列车运行对实时性的要求. 文献[4, 21]的滑模控制策略具有良好的跟踪能力和较强的鲁棒性, 并且随着高速动车组频繁的往返运行与相同的区间, 随着运营里程的增加, 会产生大量的历史运行数据. 发掘历史运行数据的潜在价值[25], 研究采用历史数据信息修正动车组速度跟踪控制器的控制量, 以减小高速动车组运行过程中未知因素对控制器的影响, 提高应用稳定性, 故建立工况数据中心修正的滑模控制器对高速动车组进行速度跟踪控制.

图 1 国内某型号的高速动车组
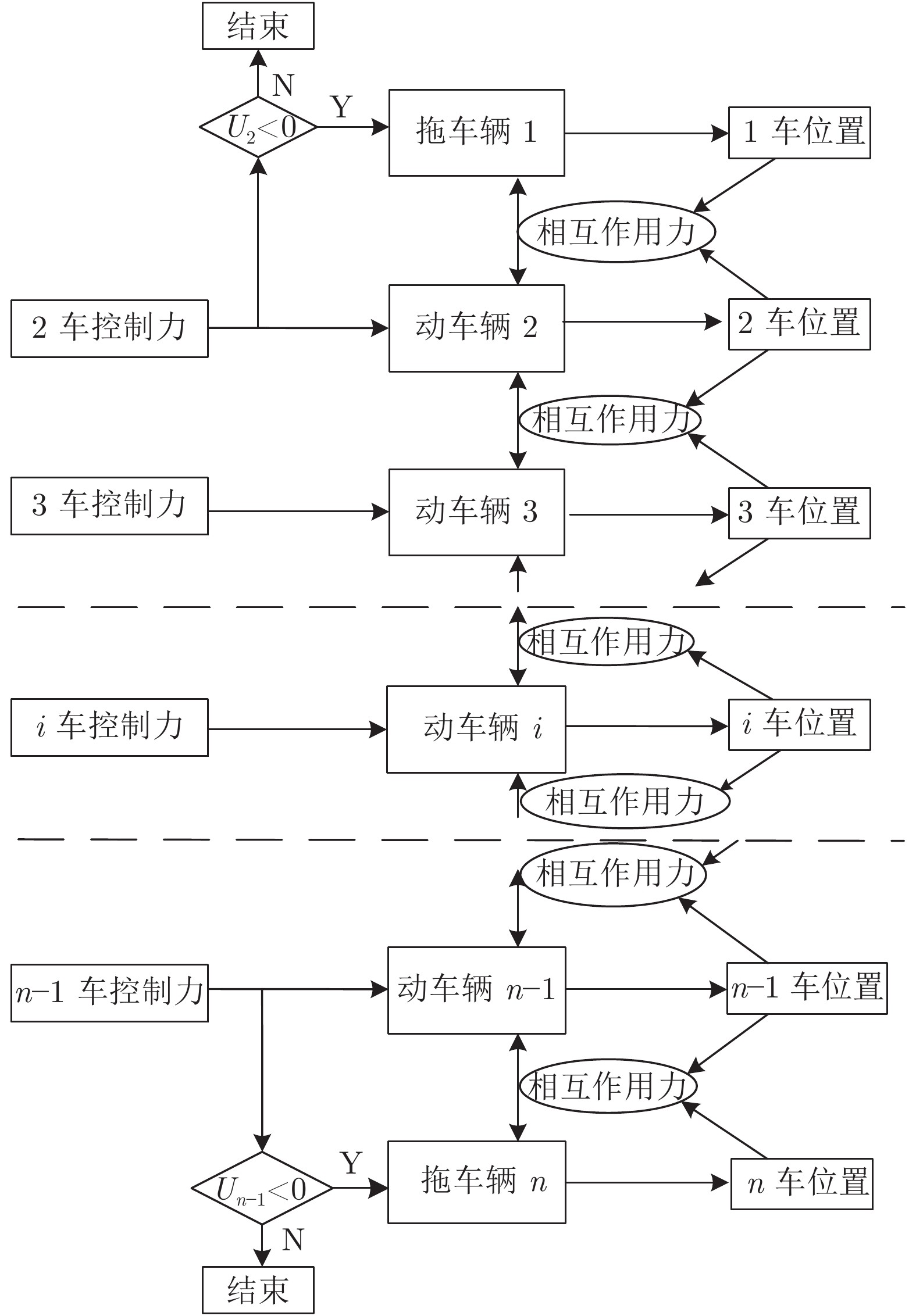
图 2 高速动车组弹簧−阻尼器系统强耦合模型

图 3 高速动车组动车与拖车链接示意图
本文区分以往高速动车组的多质点模型, 在详细分析高速动车组车钩缓冲装置对相邻车辆的作用内在规律后, 建立了车钩模型约束的多质点动力学强耦合模型. 该模型更准确反映运行环境对高速动车组运行状况的复杂影响关系, 且模型简单有效, 具有较高的精度. 结合给定的列车运行速度目标, 探究了对动车组内各车辆分别控制的分布式神经网络滑模控制方法. 为了应对列车运行过程中的不确定干扰, 利用列车以往运行过程数据, 提出了一种工况数据中心对控制器的补偿修正规则, 提高了控制策略的实用性. 通过高速列车运行过程仿真实验平台仿真验证表明, 对高速动车组建立的强耦合模型采用分布式神经网络滑模控制方法不但能够合理分配机车动力, 实现对给定速度的高精度跟踪控制, 而且可计算列车运行过程的车钩力, 使车钩力控制在合理的安全范围内, 实现动车组的安全、准时运行.
进一步, 在本文的研究分析基础上, 作者将会在以下几个方面做深入研究: 1)继续分析车钩力对整列车的运动状态影响规律, 并且从控制策略的角度减少其影响, 使列车稳定安全运行. 2)考虑到单节列车的动力系统故障[34], 在现有控制策略下能否保证整列车的运行状态. 3)虽然本文结合了车钩模型, 并考虑了延时关系, 但还是有很多未考虑的未知因素影响列车的运行, 通过大数据的分析手段进行无监督“自学习”工作, 发现未知因素的影响规律. 4)现阶段的列车运行跟踪精度已基本满足实际运行需求, 但理论应用到实际的列车运行中还有一定的距离, 继续结合实际情况, 找到两者的衔接点, 早日实现高速列车的自动驾驶.
作者简介
李中奇
华东交通大学电气与自动化工程学院教授, 工学博士. 主要研究方向为列车运行过程建模与控制. 本文通信作者. E-mail: lzq0828@163.com
金柏
华东交通大学电气与自动化工程学院硕士研究生. 主要研究方向为列车运行过程建模与控制. E-mail: jinbai0009@163.com
杨辉
华东交通大学电气与自动化工程学院教授, 工学博士. 主要研究方向为复杂系统建模, 控制与运行优化. E-mail: yhshuo@263.net
谭畅
华东交通大学电气与自动化工程学院副教授, 工学博士. 主要研究方向为复杂系统建模, 控制与运行优化. E-mail: lovetanchang@163.com
付雅婷
华东交通大学电气与自动化工程学院讲师, 工学博士. 主要研究方向为轨道交通自动化和运行优化. E-mail: fuyating0103@163.com
https://blog.sciencenet.cn/blog-3291369-1386426.html
上一篇:分数阶PID扭矩控制在边驱耦合轻轨车辆的应用研究
下一篇:基于特征点位置校正的靶标位姿测量方法