博文
基于无模型自适应控制的无人驾驶汽车横向控制方法
|
引用本文
田涛涛, 侯忠生, 刘世达, 邓志东. 基于无模型自适应控制的无人驾驶汽车横向控制方法. 自动化学报, 2017, 43(11): 1931-1940. doi: 10.16383/j.aas.2017.c160633
TIAN Tao-Tao, HOU Zhong-Sheng, LIU Shi-Da, DENG Zhi-Dong. Model-free Adaptive Control Based Lateral Control of Self-driving Car. ACTA AUTOMATICA SINICA, 2017, 43(11): 1931-1940. doi: 10.16383/j.aas.2017.c160633
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2017.c160633
关键词
无模型自适应控制,无人驾驶汽车,横向控制,预瞄偏差角
摘要
提出了一种基于无模型自适应控制的无人驾驶汽车横向控制方案.首先,将无人驾驶汽车循迹跟踪控制问题转化成预瞄偏差角跟踪问题,然后基于无人驾驶汽车横向控制系统的动态线性化数据模型,设计出无模型自适应控制算法、伪梯度估计算法和伪梯度重置算法,进而实现了自主车辆的无人驾驶.该方法的实现仅用到无人驾驶汽车运行时的输入输出数据,避免了对无人驾驶汽车进行复杂机理建模的难题,对于复杂的无人驾驶汽车运行过程具有很好的自适应性,对不同的无人驾驶车辆具有较强的可移植性.该方案已实际应用于清华大学无人驾驶汽车实验平台,在北京市丰台区的实地测试实验、在江苏省常熟市高速路的测试以及2015年"中国智能车未来挑战赛"的现场应用验证了所提方案的有效性.
文章导读
近年来, 无人驾驶汽车日渐成为汽车研究领域的热点[1-2].由于汽车是一个复杂的非线性系统, 且运行于不同的工况下, 因此, 无人驾驶汽车的循迹跟踪控制问题一直是学术界研究的重点和难点[3].
无人驾驶汽车循迹跟踪控制问题包括纵向控制和横向控制两个部分.纵向控制是指对车速的控制, 这类控制问题可以归结为对油门或刹车的控制[4]; 横向控制是指在不同车速和负载等条件下, 控制汽车转向使得汽车位置处于期望轨迹中心线处, 这类问题可以归结为对方向盘的控制[5-6].相比于纵向控制, 横向控制更为重要, 原因是横向控制直接决定循迹跟踪的性能, 是保障无人驾驶汽车安全和稳定的基础[5], 对控制算法要求较高, 本文仅就无人驾驶汽车横向控制问题进行研究.
针对无人驾驶汽车横向控制问题, 文献[6]基于汽车动力学模型设计出了状态反馈控制器, 且利用模糊增益规划(Fuzzy gain scheduling, FGS)调节控制器的输出增益, 并在TAIWAN $i$TS-1无人驾驶汽车平台上进行了验证; 文献[7]利用模型预测控制(Model predictive control, MPC)分别就汽车非线性模型和汽车时变线性模型设计了两类控制器, 并给出了仿真分析和真车实验结果; 文献[8]基于汽车运动学模型设计了参数随车速变化的比例积分微分(Proportional-integral-derivative, PID)控制器, 并将该算法应用于Babieca原型车中; 文献[9]利用PID控制器作内环较低精度控制器, 外环利用模糊控制器做高精度控制, 在实际的道路环境中进行了尝试.然而, 上述基于模型的方法需要满足相应的假设条件.例如, 侧向加速度小于0.4 g、车辆的纵向速度为常数、前轮转角直接作为输入等[6], 这些假设在实际的无人驾驶汽车运行过程中很难被满足.另外, 从理论上分析, 除了车辆本身的动力学非线性外, 车辆动力学行为与运行速度、道路以及其他天气等因素密切相关, 欲想全部精确建立汽车以及环境的动力学模型, 然后进行控制系统设计, 显然不是可行的方法[5].而采用模糊控制方法, 其隶属度函数的确定和专家经验都很难遍历所有工况下的情况, 难度大, 可应用性差[9].
在汽车运行的过程中, 会产生大量的输入输出(Input/output, I/O)数据, 这些I/O数据包含了车辆的动力学信息, 利用数据驱动的方式对无人驾驶汽车进行控制, 是目前一个新颖的方法.在数据驱动控制方面, 近些年一些典型的数据驱动控制方法相继提出并得到广泛的研究与应用, 包括虚拟参考反馈整定[10-11]、自适应动态规划[12-16]、无模型自适应控制[16-17]等.
无模型自适应控制(Model-free adaptive control, MFAC)是一种典型的在线数据驱动控制方法[16, 18], 其原理是在闭环系统的每一个动态工作点处建立一个等价的动态线性化数据模型, 然后基于此等价的虚拟数据模型设计控制器, 进而实现非线性系统的自适应控制[18].截至目前, MFAC已经得到了广泛的应用, 包括广域电力系统[19]、网络延时与丢包问题[20]、多自由度机器人外骨骼控制[21]、交直流微电网[22]以及自动泊车系统[23]等.理论和实践表明, MFAC结构简单、鲁棒性强、便于工程实现, 而且MFAC不使用模型的信息, 上述由于模型假设带来的不匹配问题可以有效地被避免.
本文提出了基于MFAC的无人驾驶汽车横向控制方案, 首先将横向控制问题转化为预瞄偏差角(汽车当前位置点和预瞄点的连线与汽车运行方向延长线形成的夹角)跟踪问题, 然后利用动态线性化技术将预瞄偏差角跟踪系统转化为等价的偏格式数据模型, 进而设计出无模型自适应控制算法、伪梯度估计算法和伪梯度重置算法.该方案仅利用无人驾驶汽车运行过程中的I/O数据, 不包含车辆的模型信息, 对于不同的车辆具有很强的可移植性.本文方案已经应用于清华大学"睿龙"号无人驾驶汽车平台, 北京市丰台区的实地测试以及江苏省常熟市高速环线的实验结果表明, MFAC对于无人驾驶汽车横向控制问题具有很明显的优势. "睿龙"号无人驾驶汽车应用MFAC预瞄偏差角跟踪方案参加了2015年第七届中国智能车未来挑战赛, 其控制算法在比赛全程中没有出现任何问题.
本文结构安排如下:第1节对无人驾驶汽车控制问题进行描述, 第2节提出基于预瞄偏差角跟踪系统的无人驾驶汽车横向控制方案, 第3节针对预瞄偏差角设计MFAC控制器, 第4节给出在实际的无人驾驶汽车平台和实际道路上的实验结果, 第5节得出结论.

图 1 车载传感器分布图
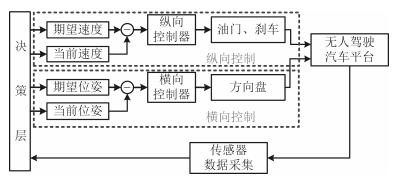
图 2 控制系统结构图
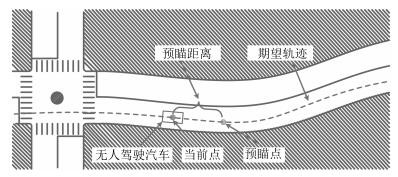
图 3 预瞄点与预瞄距离示意图
本文针对无人驾驶汽车横向控制问题, 将无人驾驶汽车循迹跟踪控制问题转化成预瞄偏差角跟踪问题, 然后基于无人驾驶汽车横向控制系统的动态线性化数据模型, 设计出无模型自适应控制算法、伪梯度估计算法和伪梯度重置算法, 相比于传统的控制方案, 该方案优点如下:
1) 避免复杂的无人驾驶汽车机理建模.无人驾驶汽车模型难以建立, 基于预瞄的控制策略也很难进行精确的数学描述, 本文设计的基于MFAC的预瞄偏差角跟踪控制方案不使用汽车的数学模型, 避免了汽车建模带来的困难.
2) 被控对象物理意义明确, 方便调试.本文将无人驾驶汽车控制问题抽象为预瞄偏差角的跟踪问题, 将原问题中AD和LD两个控制对象转化成预瞄偏差角一个控制对象, 简化了原问题的求解.
3) 控制算法具有很好的自适应性及鲁棒性.从实验的分析中可以看出, 不论是低速路段还是高速路段, 不论是直线还是转弯, 在对控制器参数不做任何修改的情况下, MFAC控制器都能适应系统的变化. MFAC的稳定性在理论上有严格的数学证明作为保障.
4) 可移植性很强, 适用于不同的无人驾驶汽车平台.本文使用C++语言编程, 不使用专门的矩阵库或最优化库, 非常便于向不同无人驾驶汽车平台进行移植.
5) 易于工程实现.本文使用的控制方案仅利用无人驾驶汽车运行过程中的预瞄偏差角和方向盘转角数据, 这些数据对于基于预瞄控制策略的无人驾驶汽车平台是很容易获取的.
本文基于该控制方案编写了调试计算机软件, 将该方案应用于真实的无人驾驶汽车平台.本文通过真实的无人驾驶平台在不同的实验场地分别进行低速实验和高速实验.在低速实验中, 将MFAC控制算法与经典PID控制算法进行对比, 与相关参考文献的工作进行比较; 对于高速实验, 截取其中100 s路段与相关文献的工作进行了比较.从对比实验的结果中可以看出, 对于无人驾驶汽车横向控制, 基于MFAC的预瞄偏差角跟踪方法具有很明显的优势.
本文提出的控制算法应用于清华大学"睿龙"号无人驾驶汽车平台并参与了第七届"中国智能车未来挑战赛", 整场比赛控制算法没有出现任何问题.
作者简介
田涛涛
北京交通大学电子信息工程学院先进控制系统研究所硕士研究生.主要研究方向为大数据环境下的数据驱动控制和优化策略.E-mail:14120214@bjtu.edu.cn
刘世达
北京交通大学电子信息工程学院先进控制系统研究所博士研究生.主要研究方向为数据驱动控制, 学习控制, 复杂工业过程.E-mail:lsdshiwo@hotmail.com
邓志东
清华大学计算机系教授.主要研究方向为人工智能, 深度神经网络, 计算神经科学, 无人驾驶汽车, 先进机器人.E-mail:michael@tsinghua.edu.cn
侯忠生
北京交通大学电子信息工程学院先进控制研究所教授.主要研究方向为无模型自适应控制理论, 数据驱动控制, 学习控制, 智能交通系统和数据挖掘在医学和交通领域中的应用.本文通信作者.E-mail:zhshhou@bjtu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1432505.html
上一篇:【当期目录】IEEE/CAA JAS第11卷第3期
下一篇:基于矩阵模型的高维聚类边界模式发现