博文
平行系统和数字孪生的一种数据驱动形式表示及计算框架
||
平行系统和数字孪生的一种数据驱动形式表示及计算框架
张俊1, 许沛东1, 王飞跃2, 3
摘要: 旨在为平行系统及ACP方法建立一种数据驱动的数学形式和计算框架, 该形式与框架也适用于数字孪生系统.首先, 基于动态系统状态方程方法论, 给出了平行系统的虚实双系统表示方法, 基于此表示方法为平行系统问题提供了一种数学表示.围绕该表示, 讨论了虚实系统互动、平行系统与数字孪生系统异同等问题.然后, 为ACP方法提供了一种计算框架, 详细解释了人工系统(Artificial systems, A)、计算实验(Computational experiments, C)、平行执行(Parallel execution, P)的数学计算求解过程, 并讨论了“学习与训练”、“实验与评估”、“管理与控制”、灵捷–聚焦–收敛(AFC)、小数据-大数据-小智能等概念的相关数学表示, 并讨论了智能科学与平行系统数学架构的关系以及平行智能的内涵.最后, 以大学校园园区能源管理系统为案例, 为平行系统数学架构和方法提供一个直观的算例.
关键词: 平行系统, 数字孪生, ACP, 人机混合智能
Parallel Systems and Digital Twins:
A Data-driven Mathematical Representation and Computational Framework
ZHANG Jun1, XU Pei-Dong1, WANG Fei-Yue
Abstract: This paper aims to provide a mathematical representation and computational framework for parallel systems and the ACP approach, which are also applicable to digital systems. Based on the system state equation methodology, the dual real-virtual system representation for parallel systems is presented, based on which the parallel system problem is described in mathematical forms. Further, the computational framework for the ACP approach, which explain in details the mathematical processes for artificial systems (A), computational experiments (C) and parallel execution (P). Based on the ACP approach framework, concepts such as "learning and training", "experiments and evaluation", "management and control" are mapped into ACP0s mathematical computational framework, as well as related concepts such as AFC (AgileFocus-Convergence) and "small data, big data, small intelligence". The synergy of parallel system framework and artificial intelligence technology is also discussed and investigated, leading to the origin and implications of "parallel intelligence". A campus-wide energy management problem with considerations of human factors is utilized as an illustrative example of applying the parallel system mathematical representation and computational framework in power and energy systems.
Key words: Parallel systems, digital twins , ACP, hybrid human-machine enhanced intelligence
1. 平行系统和ACP方法
平行系统理论是复杂自适应系统理论和复杂性科学的延展.平行系统基于虚拟场景, 利用自适应演化等方法驱动实验, 评估各类参数配置、技术方案的效果, 实现系统演化的建模.通过实际系统与人工虚系统协同演化、闭环反馈和双向引导, 实现对实际系统的目标优化[1-5].
平行系统的本质就是把复杂系统中难以认知的"虚"和"软"的部分, 通过可定量、可实施、可重复、可实时的计算实验, 使之硬化, 以解决实际复杂系统中不可准确预测、难以拆分还原、无法重复实验等问题.
平行系统的核心是ACP方法, 其框架如图 1所示.主要由三部分组成. 1)由实际系统的数据驱动, 借助系统机理、知识表示与机器学习等手段, 针对实际系统中的各类元素和问题, 构建可计算、可重构、可编程的软件定义的对象、软件定义的流程、软件定义的关系等, 进而将这些对象、流程、关系等组合成软件定义的人工系统(Artificial systems, A), 利用人工系统对复杂系统问题进行建模; 2)基于人工系统这一"计算实验室", 利用计算实验(Computational experiments, C), 设计各类智能体的组合及交互规则, 产生各类场景, 运行产生完备的场景数据, 并借助机器学习、平行动态规划、数据挖掘等手段, 对数据进行分析, 求得各类场景下的最优策略; 3)将人工系统与实际系统同时并举, 通过一定的方式进行虚实互动, 以平行执行(Parallel execution, P)引导和管理实际系统.从流程上而言, 平行系统通过数据获取、人工系统建模、计算实验场景推演、实验解析与预测、管控决策优化与实施、虚实系统实时反馈、实施效果实时评估来完成闭环处理过程[6].
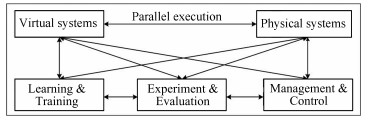
图 1 平行系统理论与ACP方法
Fig. 1 Parallel system theory and ACP method
ACP方法中的计算实验以智能体代替实际系统中的各种元素, 使各种因现实因素限制而无法在实际系统中进行的实验得以实施, 突破了无法通过重复实验获取知识与经验的局限.计算实验具有可设计性、可反复进行等特点.它通过对实际系统进行各种关于性能、可靠性、方案鲁棒性及正确性等同一条件下短时间内大量反复的"加速"实验、"压力"实验、"极限"实验等, 对各种可能的系统场景进行"试错"实验, 并进一步对人工系统涌现出的复杂系统行为和系统现象进行标定分析与统计分析, 按照一定的指标体系对各种解决方案进行学习与评估, 进而全面、准确、及时、量化地获得对复杂系统问题的最优控制方案.
计算实验通过实际系统与人工系统之间的相互连接, 对二者的行为进行对比、分析、预测与评估, 完成对各自未来状况的"借鉴"和预估, 相应地调节各自的管理和控制方式, 它主要包含三种实现方式.
1) 学习与培训:在这种方式中, 人工系统被用作学习和培训复杂系统的管理与控制.通过实际系统与人工系统的适当连接互动, 通过测量实际系统与人工系统评估状态之间的差别, 产生误差反馈信号, 对人工系统的参数进行修正, 减少差别.通过循环往复的交互尽可能地使人工系统模拟实际系统, 并量化学习与培训的实际效果.
2) 实验与评估:在这种方式中, 人工系统被用作实施各种由于成本、安全等原因无法开展的重要破坏性实验和创新性实验, 分析系统的行为和反应, 并对不同解决方案的效果进行评估, 从而为量化评估系统要素、实现控制方案创新提供依据.同时, 人工系统的实验与评估方案也可以作为实际系统的预案, 增强其运行的可靠性和应变能力.
3) 管理与控制:这种方式的目标是以虚实互动的方式实现复杂系统的管理与控制.实际系统中的新问题、新需求和新趋势可以实时导入人工系统, 通过在人工系统中的实验、测评和完善, 获得优化的新解决方案, 并据此引导实际系统的发展和演变, 从而以"实际逼近人工"的方式实现复杂系统的"创新"功能.
数字孪生(Digital twin, DT)是一种实现物理系统向信息空间数字化模型映射的关键技术.数字孪生依托配置在物理系统各部分的传感器, 对物理实体进行数据分析及高保真建模, 并形成涵盖多学科、多物理量、多时间尺度、多概率的仿真过程, 从而反映物理系统在不同真实场景中的全生命周期过程.借助于各种高性能传感器和高速通信技术, 数字孪生可以通过集成多维物理实体的数据, 结合数据分析和模拟仿真手段, 近乎实时地呈现物理实体的实际情况, 通过虚实交互接口对物理实体进行控制[6].平行系统和数字孪生均为解决信息、物理、社会融合这一科学问题提供了新的解决思路, 且两者都与先进传感采集、仿真、高性能计算、智能算法等的发展有着密不可分的关系.
以上是对平行系统概念和方法及数字孪生的概述, 本文旨在此基础上, 从平行系统着手, 为平行系统及ACP方法建立一种数学方法架构, 该框架同样适用于数字孪生系统.首先, 基于动态系统状态方程方法论, 给出了平行系统的虚实双系统表示方法, 基于此表示方法为平行系统问题提供了一种数学描述.然后, 为ACP方法提供了一种数学方法架构, 详细解释了人工系统、计算实验、平行执行的数学过程.最后, 讨论了智能科学和平行系统数学架构的关系以及平行智能的内涵.
2. 平行系统问题的数学表示
2.1 平行系统模型
本节旨在为平行系统问题建立一种数学表示形式, 区别于常规的用一组系统状态方程的方法, 我们用一对虚 实系统状态方程{SR, SA}来描述平行系统, 称为"虚实双系统表示方法".具体而言, 记一个复杂实系统SR为

这里,XtR是实系统在t时刻的状态, UtR是在t时刻施加给系统的控制量, FtR是系统状态转移规则, ![]() 表示系统状态在规则FtR作用下转移, ⋂是语义逻辑规则"并且",
表示系统状态在规则FtR作用下转移, ⋂是语义逻辑规则"并且",  表示在观测规则 HtR下系统呈现的观测值,YtR表示在t时刻系统的观测值.特别需要说明的是, 在上式的实系统表示中, 所有的系统状态、系统观测、状态转移规则、观测规则、控制量都是以语义描述的, 是语义系统, 而数值系统可以看作是语义系统的一种特殊形式.为下文标记方便起见, 我们将式(1)用类数值形式来描述, 即
表示在观测规则 HtR下系统呈现的观测值,YtR表示在t时刻系统的观测值.特别需要说明的是, 在上式的实系统表示中, 所有的系统状态、系统观测、状态转移规则、观测规则、控制量都是以语义描述的, 是语义系统, 而数值系统可以看作是语义系统的一种特殊形式.为下文标记方便起见, 我们将式(1)用类数值形式来描述, 即

其中, FtR为系统状态转移方程, HtR为系统观测方程.
关于复杂系统的讨论:一个复杂系统, 在有限的传感、通信、计算等资源和理论方法局限等条件下, 具有不可分拆、不可建模、不可直接分析的特点.该特点反映到系统表达式中, 即系统状态XtR, 控制量UtR, 系统状态转移规则FtR, 观测规则HtR不可能同时可知.如果全部都可知, 即退化为简单系统, 而系统表达式也不能再拆分成子系统表达式进行分析.而这些, 是分析复杂系统的核心挑战和问题[7].
传统的系统分析方法, 是要求根据YtR对XtR, UtR, FtR, HtR进行求解, 而这对于复杂系统是不可能的, 因此文献[2]提出了平行系统方法.具体而言, 平行系统方法构建了人工系统SA (下文也称"虚系统"), 记作

或其类数值表示形式

相似的, XtA是系统在t时刻的状态, UtA是在t时刻施加给系统的控制量, FtA是系统状态转移规则,![]() 表示系统状态在规则 FtA作用下转移, 表示在观测规则HtA下系统呈现的观测值, YtA表示系统在t时刻系统的观测值.
表示系统状态在规则 FtA作用下转移, 表示在观测规则HtA下系统呈现的观测值, YtA表示系统在t时刻系统的观测值.
由于式(3)、式(4)是人工虚拟系统, 是构造出来的, 因此系统状态XtA, 控制量UtA, 系统状态转移规则FtA, 观测规则HtA是构造过程全部可知的.人工系统的构造方法, 可能是根据对实系统机理、知识已有的理解, 也可能是通过系统的观测数据, 根据数据驱动和数据挖掘的方法得出的.因此人工系统SA具有可认知性, 成为建模、分析、认知复杂系统的有力工具, 同时人工系统SA有可能分拆成多个子系统, 进行并行快速分析, 从而应对系统分析计算复杂性的问题.
2.2 平行系统问题的数学表示
根据上述平行系统的虚实双系统表示方法, 我们将平行系统所要解决的数学问题描述如下.设系统{SR, SA}在时刻t
1) 客观量的说明:一般而言, 实系统状态![]() 系统状态转移规则
系统状态转移规则![]() 观测规则
观测规则![]() 不可能同时可知, 因此将它们作为系统客观存在, 而不作为数学求解的对象.这里, 脚标1:t代表从时刻1到时刻.
不可能同时可知, 因此将它们作为系统客观存在, 而不作为数学求解的对象.这里, 脚标1:t代表从时刻1到时刻.
2) 控制量的说明:控制量![]() , 由于复杂系统的特性, 影响、控制、管理系统的因素不可能全部可知.设其中的一个子集已知, 即, 已知的可以影响或控制该复杂系统的一些控制手段和途径, 为标注简单起见, 下文依然用UtR来表示已知的实系统控制变量.
, 由于复杂系统的特性, 影响、控制、管理系统的因素不可能全部可知.设其中的一个子集已知, 即, 已知的可以影响或控制该复杂系统的一些控制手段和途径, 为标注简单起见, 下文依然用UtR来表示已知的实系统控制变量.
3) 已知量:实系统观测量![]() ,实系统控制变量
,实系统控制变量![]() .虚系统中的状态
.虚系统中的状态![]() , 控制量
, 控制量![]() , 系统状态转移规则
, 系统状态转移规则![]() , 观测值
, 观测值![]() , 观测规则
, 观测规则![]() .
.
4) 构造系统时求解量:根据已知量和预设的系统目标, 构造(或求解) t时刻的系统时, 求解量为系统转换规则FtA, 观测规则HtA.
5) 管控系统时求解量:根据已知量和预设的系统目标, 管控t时刻系统时, 求解量为实系统控制变量UtR, 人工系统控制量UtA.
一般性的人工系统求解的数学描述如下
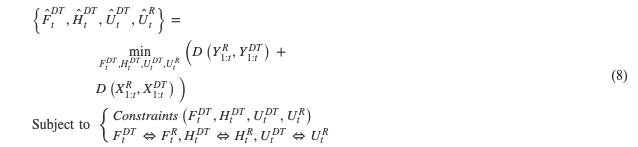
由以上数字孪生系统的表示形式可知, 数字孪生系统的本质是求解人工系统的系统状态转移规则和观测规则 以及联合求解虚实系统控制量
以及联合求解虚实系统控制量 
数字孪生系统显著的特点包括:
1) 数字孪生系统的"孪生"反映在要求![]() 和
和![]() 两方面上.
两方面上.  ,
, 要求数字孪生虚实系统的状态转移规则、观测规则、虚实系统控制量等价对应.
要求数字孪生虚实系统的状态转移规则、观测规则、虚实系统控制量等价对应. 不仅要求虚实系统的表象
不仅要求虚实系统的表象 一致, 更要求系统状态
一致, 更要求系统状态 一致, 以达到"孪生"的目的.
一致, 以达到"孪生"的目的.
2) 数字孪生系统一般是在仿真系统基础上, 进一步联合求解虚实系统的控制量 , 并且一般会实时反馈到实系统中以达到某种预定的系统控制目标, 而仿真系统一般来说不需要对实系统和虚系统进行统一的交互式实时控制过程.
, 并且一般会实时反馈到实系统中以达到某种预定的系统控制目标, 而仿真系统一般来说不需要对实系统和虚系统进行统一的交互式实时控制过程.
总结以上分析, 平行系统和数字孪生系统在数学表示上的异同如下:
1) 平行系统和数字孪生系统都是利用基于实系统观测来求解或构建人工系统FtA,HtA来进行系统分析的科学方法.平行系统和数字孪生系统都需要联合求解实系统与虚系统的控制变量对 , 来实时地对虚实系统进行控制, 从而达到某种预定的系统目标.
, 来实时地对虚实系统进行控制, 从而达到某种预定的系统目标.
2) 对于数字孪生系统, 一般要求人工构建的虚系统与实际系统在状态转换、观测、控制的机理上相互对应等价, 才能称之为"仿真"和"孪生".因此数字孪生系统更多是对于机理明确的系统而言.
3) 平行系统的虚系统除了对复杂系统已知成分进行模拟, 也承担了为复杂系统尚未明确的机理做出构建、解释的功能.对于复杂系统, 由于其状态、状态转换规则、观测规则在很多情况下都不完全清楚, 因此在用平行系统对复杂系统进行分析时, 并不一定(也无法)追求在状态转换、观测、控制的机理上完全对应, 对人工虚系统的控制和对实系统的控制也不一定要完全对应.平行系统所构建的虚系统的目标是能够正确地反映系统的控制和观测的正向关系, 所构造的虚系统能够解释复杂实系统, 而非预定虚实系统各数学成分的一一对应和等价.
因此, 和平行系统相比, 数字孪生系统具有更严格的约束条件和更明确的虚实系统对应性.
3. ACP方法的数据驱动计算框架
3.1 ACP方法的计算框架
如上文所述, 平行系统的核心是ACP方法.利用上文所建立的平行系统数学描述方法, ACP方法的数据驱动计算框架描述如下.
(A)人工系统:平行系统问题的数学实质是, 在每个时刻t, 在实系统和人工系统转移规则、观测规则以及控制变量等自身变化的约束下, 构造人工系统FtA,HtA, 使得实系统的观测值![]() 和虚拟系统的观测值
和虚拟系统的观测值 某种距离量度最小.因此, 构造(或求解) FtA,HtA就是构建人工系统的过程.
某种距离量度最小.因此, 构造(或求解) FtA,HtA就是构建人工系统的过程.
(P)平行执行:平行系统通过最小化虚实系统的观测距离量测  等目标来联合求解实系统控制变量
等目标来联合求解实系统控制变量 和虚系统控制变量
和虚系统控制变量 , 实现虚实系统的互相反馈和驱动, 该数学过程即为平行执行.
, 实现虚实系统的互相反馈和驱动, 该数学过程即为平行执行.
(C)计算实验:计算实验的具体计算框架详述如下.
对于虚系统SA

实际上, 是由一系列的虚拟系统构成, 即

其中 是第n个虚系统
是第n个虚系统

一个实复杂系统 需要用一个虚拟系统群来描述和解释, 是因为复杂系统存在的不确定性和随机性, 决定了其分析过程必须进行计算实验, 具体而言:
需要用一个虚拟系统群来描述和解释, 是因为复杂系统存在的不确定性和随机性, 决定了其分析过程必须进行计算实验, 具体而言:
1) 不确定性:平行系统问题的实质是通过比较虚实系统的观测, 对系统进行构建和解释, 并同时求解虚实系统的最佳控制量, 来实现系统目标.实质上, 是构建一个相较于实系统而言比较低维度的可观可控系统模型, 来对复杂系统的某些性质进行描述解释, 因此必定会出现"多解"情况, 即多个(或无数个)语义系统均可以解释同一种表象(实系统观测)的情况, 因此平行系统必须有机制来应对这种情况, 其方法就是用大量的可行的系统解样本来描述解空间, 也即用大量可建模、可分析的系统来描述机理不清的复杂系统.
2) 随机性:平行系统中虚实系统规则 都可能是随机过程, 在建模过程中, 需要考虑如何表征这些随机性, 对于一般性复杂系统, 在语义层次和数值层次上, 在缺少解析形式公式的情况下用系统取样法来表征系统的分布, 是常用的、标准的分析方法.
都可能是随机过程, 在建模过程中, 需要考虑如何表征这些随机性, 对于一般性复杂系统, 在语义层次和数值层次上, 在缺少解析形式公式的情况下用系统取样法来表征系统的分布, 是常用的、标准的分析方法.
则计算实验的计算框架描述如下:在t−1时刻, 记与复杂实系统对应的人工系统群为

其中,  表示t时刻的人工系统群里第n个人工系统,
表示t时刻的人工系统群里第n个人工系统,  是人工虚拟系统群中人工系统的个数.
是人工虚拟系统群中人工系统的个数.
1) 定义 (或其语义系统形式
(或其语义系统形式 是人工系统控制规则或虚系统的控制率, 即从系统状态和观测推出控制量的规则.
是人工系统控制规则或虚系统的控制率, 即从系统状态和观测推出控制量的规则.
2) 定义 即
即 , 为实系统控制变量综合函数, C(⋅)是从人工虚拟系统群SAt的各种状态量、观测量、控制量中综合出实系统控制变量的规则与方法, 也即实系统的控制率.
, 为实系统控制变量综合函数, C(⋅)是从人工虚拟系统群SAt的各种状态量、观测量、控制量中综合出实系统控制变量的规则与方法, 也即实系统的控制率.
3) 定义以下两个函数, 表示一个人工系统随着时间变化的规律, 在本文中P(⋅), Q(⋅), 被称为超系统函数.
a) 定义 , 即P(⋅)是状态转移函数
, 即P(⋅)是状态转移函数 自身的转移函数.
自身的转移函数.
b) 定义 , 即Q(⋅)是观测函数
, 即Q(⋅)是观测函数 自身的转移函数.
自身的转移函数.
c) 关于"超系统函数"的讨论:超系统函数是描述系统特性转变的函数, 具体而言, 是描述系统状态转移特性Ft和系统观测特性Ht的函数.比如, 在雷达追踪飞机的应用中所用到的多模型法, 就是在各种飞机运动模型(如直飞、加速、转弯等)之间建立转换关系, 以达到更好的追踪性能.在复杂系统中, 比如说电力系统, 各个可能的运行方式代表了不同的电力系统状态转移特性Ft和系统观测特性Ht, 而由于可再生能源发电和负荷等环境因素的变化, 电力系统会以一定的规律来切换运行方式.
d) "超系统函数"实际上是在语义和知识层面上描述系统本质变化的函数, 而随着人工智能技术普遍运用, "超系统函数"更多的是用语义网络、时变知识图谱等知识系统推理来描述.
e) 系统状态转移函数 描述的是系统状态的转换, 即"if-then"问题,
描述的是系统状态的转换, 即"if-then"问题,  ; 超系统函数
; 超系统函数 则是解决"what-if"问题, 即系统本质如何发生变化.
则是解决"what-if"问题, 即系统本质如何发生变化.
基于以上定义的数学模型与符号, 计算实验过程的一种数学计算框架如下:
1) 利用超系统函数P(⋅), Q(⋅)以及采样技术, 从 生成候选系统群
生成候选系统群 , 具体为∀n,
, 具体为∀n,  ,
, .
.
2) 利用实系统的观测 , ∀n计算
, ∀n计算 , 对结果用适当的滤波算法进行处理, 去除观测量和实系统观测量差距过大的虚系统, 再进行重采样, 形成进入下一个时刻的人工系统群
, 对结果用适当的滤波算法进行处理, 去除观测量和实系统观测量差距过大的虚系统, 再进行重采样, 形成进入下一个时刻的人工系统群 .
.
3) 计算 , 在强化学习框架下, 联合训练超系统函数P(⋅), Q(⋅), 虚系统控制函数T(⋅)和实系统控制函数C(⋅).
, 在强化学习框架下, 联合训练超系统函数P(⋅), Q(⋅), 虚系统控制函数T(⋅)和实系统控制函数C(⋅).
4) 下一时刻t+1到来, 跳转执行步骤1).
3.2 关于ACP方法计算框架的讨论
和平行系统与ACP方法紧密相关的重要概念, 如ACP计算框架实现的三种方式"学习与训练"、"实验与评估"、"管理与控制"; 系统目标灵捷-聚焦-收敛(Agile-Focus-Convergence, AFC)均可以利用上述数学表示和计算框架来进行描述, 具体说明如下.
以上对ACP方法的数学表示是对于一般性系统运行而言, 而根据不同的系统目标, ACP方法的一般数学形式会做相应地改写.针对ACP方法实现的三种方式"学习与训练"、"实验与评估"、"管理与控制", 其数学形式的改写如下.
学习与训练:实际系统的机理和数据驱动, 借助知识表示与知识学习等手段, 将复杂系统的对象、关系、流程等组合成软件定义的人工系统.利用人工系统对复杂系统问题进行建模, 其数学形式为

在"学习与训练"的模式下, 求解的是虚系统状态转移函数 、观测规则
、观测规则 、超系统函数P,Q、虚系统控制函数T, 实系统控制函数C.从而达到向实系统学习、训练与构建出虚拟系统的目的.
、超系统函数P,Q、虚系统控制函数T, 实系统控制函数C.从而达到向实系统学习、训练与构建出虚拟系统的目的.
实验与评估:基于人工系统这一"计算实验室", 利用计算实验, 设计各类智能体的组合及交互规则, 产生各类场景, 运行产生完备的场景数据, 并借助机器学习、平行动态规划、数据挖掘等手段, 对数据进行分析, 求得各类场景下的最优策略.因此, 在"实验与评估"方式中,  已经通过学习训练求解, 通过设置虚拟系统状态序列XAt来模拟各种实验场景, 从而得出系统在各种场景下行为的评估.
已经通过学习训练求解, 通过设置虚拟系统状态序列XAt来模拟各种实验场景, 从而得出系统在各种场景下行为的评估.
管理与控制:这种方式的目标是以虚实互动的方式实现复杂系统的管理与控制.将人工系统与实际系统同时并举, 通过一定的方式进行虚实互动, 以平行执行引导和管理实际系统.具体而言

在"管理与控制"的模式下, 可以联合训练也可以假设是已知的, 求解的目标为虚实系统的控制量 , 其目标有两个, 其一是
, 其目标有两个, 其一是 , 其中
, 其中 为系统预设的目标状态, 其二是
为系统预设的目标状态, 其二是 .以上数学公式表示的是, 通过联合求解虚实系统的控制量
.以上数学公式表示的是, 通过联合求解虚实系统的控制量 , 使得虚系统向预设的系统目标
, 使得虚系统向预设的系统目标 收敛, 同时通过最小化虚实系统表象的差异
收敛, 同时通过最小化虚实系统表象的差异 , 使得实系统向预设的虚系统状态收敛, 从而达到"引导的目的".
, 使得实系统向预设的虚系统状态收敛, 从而达到"引导的目的".
通过ACP方法的应用, 平行系统旨在实现灵捷、聚焦、收敛(AFC)的系统目标, 这些目标和ACP方法的数学表示关系如下:
灵捷(A):表现在利用超系统函数P(⋅), Q(⋅), 从 取样生成
取样生成 , 在每个时刻生成拥有巨量人工系统系统群, 通过对系统取样的方法, 来应对复杂系统的不确定性和随机性, 因此产生候选人工系统具有灵捷性的群
, 在每个时刻生成拥有巨量人工系统系统群, 通过对系统取样的方法, 来应对复杂系统的不确定性和随机性, 因此产生候选人工系统具有灵捷性的群 来应对复杂系统各种可能性.
来应对复杂系统各种可能性.
聚焦(F):表现在利用实系统的观测 , 计算
, 计算 , 挑选符合条件的候选虚系统及对应控制量, 再进行重采样, 形成新的人工系统群SAt, 是将平行系统虚拟系统群中每个系统聚焦到实系统的观测上.
, 挑选符合条件的候选虚系统及对应控制量, 再进行重采样, 形成新的人工系统群SAt, 是将平行系统虚拟系统群中每个系统聚焦到实系统的观测上.
收敛(C):表现在利用 联合训练各超系统函数P(⋅), Q(⋅), 虚系统控制函数T(⋅), 实系统控制函数C(⋅).使得虚实系统观测能够收敛一致, 同时对于各超系统函数的训练也使得人工系统群和复杂实系统能够相互收敛.
联合训练各超系统函数P(⋅), Q(⋅), 虚系统控制函数T(⋅), 实系统控制函数C(⋅).使得虚实系统观测能够收敛一致, 同时对于各超系统函数的训练也使得人工系统群和复杂实系统能够相互收敛.
4. 平行智能的内涵与形成
平行系统的一个重要目标是从实系统的"小数据"出发, 生成人工系统"大数据", 再提炼出应对各种场景的"小智能".这个目标表现在利用实际系统的观测"小数据"  与人工系统交互, 基于人工系统生成"大数据"
与人工系统交互, 基于人工系统生成"大数据"  , 再通过学习与分析获取针对具体场景的"小知识"
, 再通过学习与分析获取针对具体场景的"小知识"  , 并通过虚实交互反馈逐步精细化针对当前场景的"精准知识"
, 并通过虚实交互反馈逐步精细化针对当前场景的"精准知识"  .在这个过程中, 虽然没有显式地提及人工智能(Artificial intelligence, AI)技术, 但是AI技术实际上是作为核心技术贯穿于平行系统问题的各个环节, 因此平行系统所展现出的智能, 即为"平行智能"[8-13].平行系统和AI技术的关系归纳如下.
.在这个过程中, 虽然没有显式地提及人工智能(Artificial intelligence, AI)技术, 但是AI技术实际上是作为核心技术贯穿于平行系统问题的各个环节, 因此平行系统所展现出的智能, 即为"平行智能"[8-13].平行系统和AI技术的关系归纳如下.
人工系统中的AI和知识工程: 以虚系统的数学表示![]() 为例,在本文所有提及的虚实系统中, 建模与构建都是在语义层面, 即状态量
为例,在本文所有提及的虚实系统中, 建模与构建都是在语义层面, 即状态量 、观测量
、观测量 、控制量
、控制量 都是语义量, 状态转移规则
都是语义量, 状态转移规则 、观测规则
、观测规则 都是语义规则.常规的数值系统可以看作是语义系统的一种特例或子集.而人工智能和知识工程技术, 就是针对语义层次系统的技术, 如概率图技术、语义图技术、知识图谱技术[14-15]等, 就是对语义规则系统建模的典型人工智能技术.深度网络等联结主义方法也可以用来隐式地描述规则Ft拓展了规则的系统的能力.值得一提的是, 在当前的技术条件下, 语义系统状态、规则、观测的提取, 已经超越了传统的数值系统的限制, 在一般情况下, 是结合已有的系统先验机理知识, 通过大数据和知识工程方法自动提取出来.因此, 人工智能技术和知识工程技术为分析复杂系统和构建平行系统提供了技术基础和先决条件, 即经常在平行系统中提到的"大数据填坑"的知识自动化过程[16].为例,
都是语义规则.常规的数值系统可以看作是语义系统的一种特例或子集.而人工智能和知识工程技术, 就是针对语义层次系统的技术, 如概率图技术、语义图技术、知识图谱技术[14-15]等, 就是对语义规则系统建模的典型人工智能技术.深度网络等联结主义方法也可以用来隐式地描述规则Ft拓展了规则的系统的能力.值得一提的是, 在当前的技术条件下, 语义系统状态、规则、观测的提取, 已经超越了传统的数值系统的限制, 在一般情况下, 是结合已有的系统先验机理知识, 通过大数据和知识工程方法自动提取出来.因此, 人工智能技术和知识工程技术为分析复杂系统和构建平行系统提供了技术基础和先决条件, 即经常在平行系统中提到的"大数据填坑"的知识自动化过程[16].为例,
计算实验中的演化计算技术:在ACP方法的计算实验过程中, 利用超系统函数P(⋅)、Q(⋅), 从人工系统群 生成候选系统群
生成候选系统群 , 再利用实系统的观测
, 再利用实系统的观测 计算
计算 , 对
, 对 进行选择, 最后进行重采样, 形成进入下一个时刻的人工系统群
进行选择, 最后进行重采样, 形成进入下一个时刻的人工系统群 , 该过程在每一时刻循环往复, 即形成了以演化计算技术[17]为基础的计算实验框架.
, 该过程在每一时刻循环往复, 即形成了以演化计算技术[17]为基础的计算实验框架.
平行执行中的强化学习技术:在联合训练各超系统函数P(⋅), Q(⋅), 虚系统控制函数T(⋅), 和实系统控制函数C(⋅)的过程中, 基于深度网络的强化学习技术是常用的AI技术, 使得在系统机理知识缺乏的情况下, 仍然能够对系统行为进行正确的基于数据驱动的建模.
ACP方法中的语言动力学和语义嵌入技术:人的认知和思维能力是针对语义的, 在复杂系统管控中, 许多大的复杂过程并没有或很难找到数值化的求解模型, 却能够通过基于人脑的经验和知识进行有效的控制过程状态研判、控制策略制定和执行效果评估.另一方面, 即使如此, 复杂系统也通常超出人的认知能力带宽, 因此必须要借助计算来分析语义描述的复杂系统.为了完成这些复杂大系统语义层次上的分析和综合, 需要将语义系统映射到数值系统, 这样才能够交付计算机进行计算分析.而"语言动力学"框架和"语义嵌入"技术提供了这种转换的方法与技术.
在语言动力学系统(Linguistic dynamic systems, LDS)中, 问题、情形、策略、观察、目标和评估使用语义来表达.而LDS正是旨在有效地直接利用语义来处理复杂大系统, 特别是人机集成的复杂大系统的建模、分析和综合理论[18-21].在完成语义空间向数字空间的映射后, 其最大的特征是使用常规动力学系统中分析和综合的概念和方法, 特别是稳定性理论、全局分析、优化控制器的设计方法等, 为知识体系和知识过程建立一个可描述的、可计算的、可数值求解的理论框架, 即用语义来表达问题、描述情形、叙述策略的目标、制定策略、最后确定并实施评价程序.
在原始的语言动力学中, 从语言到数值的映射是以模糊集理论、元胞理论、各种基础词向量化技术为主要工具来完成的.随着新一代人工智能技术的发展, 语义嵌入技术成为完成这种映射的技术[22], 在概念上, 语义嵌入是指把一个维数为所有语义单元的数量的高维空间嵌入到一个维数低得多的连续稠密向量空间中, 每个语义单元被映射为低维稠密向量空间中的向量.
通过语言动力学框架和语义嵌入技术, 语义空间得以映射入数值空间, 但是该映射也需要比较大量的先验语义数据为基础.一旦映射到数值空间中, 各种AI和控制系统分析技术, 如深度学习、最优控制、自适应最优化控制等, 就可以在此空间中开始运用.
5. 基于平行系统架构的能源网络管控案例
本节中, 我们将以美国某大学校园楼宇的能源管理策略制定为案例[23-27], 为上文中平行系统数学架构和方法提供一个直观的算例, 并说明该方法在能源电力领域中的应用.
待研究的大学校园电网拓扑结构如图 2所示.本案例通过控制楼宇基准温度、同时考虑室内环境舒适度与工作人员效率的关联关系, 实现校园能源电力系统及社区人力系统交互作用下整体社会成本的优化和能源系统的管理.基本流程如图 3所示.
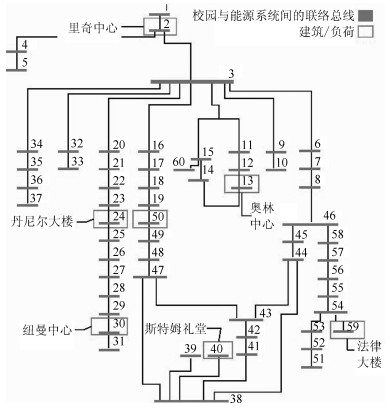
图 2 美国某大学校园电网的网络拓扑
Fig. 2 The network topology of the campus network of an American university
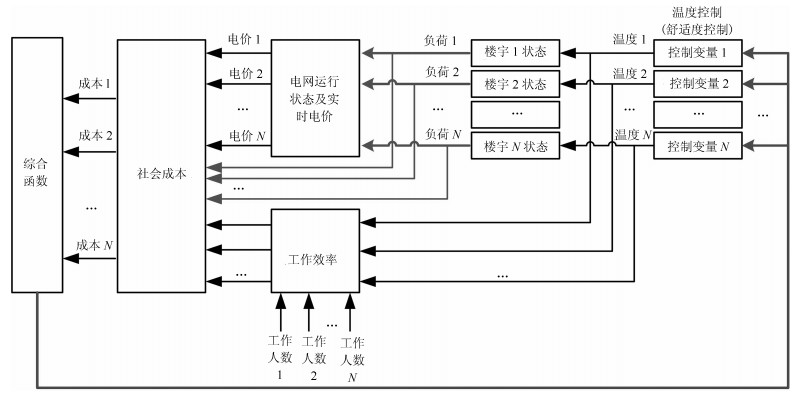
图 3 校园能源社区系统管控流程
Fig. 3 Management and control process of campus energy community system
如图 3所示, 通过设定校园各楼宇的室内温度基准值, 一方面, 楼宇状态参数发生变化, 进一步产生该时刻对应的楼宇负荷, 楼宇负荷计入当前校园电网状态, 并基于电网状态产生实时电价, 各楼宇的能耗成本即可由实时电价与楼宇负荷计算得出.另一方面, 通过温度基准值调整实现室内环境舒适度控制, 环境舒适度同时对人类工作效率产生影响, 该时段人力工作成本也发生变化.人力工作成本与能耗成本共同组成楼宇的社会成本, 而基于社会成本、楼宇参数、电网状态、工作效率等观测指标, 系统结合相关策略函数进一步制定下一时刻的室内温度调节方案.
根据上述控制流程, 可给出校园能源社区系统的实系统数学表示

这里,  是校园能源社区实系统在t时刻的状态, 包括楼宇状态、工作人员状态、电网状态等多维数据, 由于实系统为复杂系统, 因此实系统状态
是校园能源社区实系统在t时刻的状态, 包括楼宇状态、工作人员状态、电网状态等多维数据, 由于实系统为复杂系统, 因此实系统状态 无法完全观测.
无法完全观测.  是在t时刻施加给校园能源社区实系统的控制量, 该复杂系统涉及的控制因素数量很多, 同样的, 无法全部可知, 本案例中仅考虑每个楼宇的室内温度作为控制变量.
是在t时刻施加给校园能源社区实系统的控制量, 该复杂系统涉及的控制因素数量很多, 同样的, 无法全部可知, 本案例中仅考虑每个楼宇的室内温度作为控制变量.  为对应的系统状态转移规则, 该规则复杂且在有限资源下不可全知.
为对应的系统状态转移规则, 该规则复杂且在有限资源下不可全知.  表示校园能源社区实系统在t时刻系统的观测值, 在本算例中取各楼宇的负荷情况为观测值.
表示校园能源社区实系统在t时刻系统的观测值, 在本算例中取各楼宇的负荷情况为观测值.  为对应的系统观测规则, 由于影响楼宇能耗的因素众多, 该规则同样是一个复杂规则.
为对应的系统观测规则, 由于影响楼宇能耗的因素众多, 该规则同样是一个复杂规则.
鉴于校园能源社区实系统的复杂系统特征, 结合平行系统方法构建对应的校园能源社区人工系统, 其数学表示如下

其中,  是人工系统在t时刻的状态, 主要由楼宇内部状态参量、楼宇工作人员数量、电网参数、环境量测信息(主要为室外温度)构成.
是人工系统在t时刻的状态, 主要由楼宇内部状态参量、楼宇工作人员数量、电网参数、环境量测信息(主要为室外温度)构成.  是在t时刻施加给人工系统的控制量, 本案例中
是在t时刻施加给人工系统的控制量, 本案例中 为每个楼宇的室内温度基准值控制量.
为每个楼宇的室内温度基准值控制量. 为对应的系统状态转移规则.
为对应的系统状态转移规则.  表示人工系统在t时刻系统的观测值, 取为人工系统中各楼宇的负荷情况.
表示人工系统在t时刻系统的观测值, 取为人工系统中各楼宇的负荷情况.  为对应的系统观测规则.根据校园能源社区实系统与人工系统的数学表示形式以及该场景下的管控目的, 可构建平行系统方法中人工系统求解的一般性目标方程如下
为对应的系统观测规则.根据校园能源社区实系统与人工系统的数学表示形式以及该场景下的管控目的, 可构建平行系统方法中人工系统求解的一般性目标方程如下

其中, C为社会成本函数.在平行系统方法中, 实现系统引导和管控的核心在于对最优解集 的求取.则在本案例的研究场景中, 上述数学量的求解方法如下.
的求取.则在本案例的研究场景中, 上述数学量的求解方法如下.
系统状态转移规则  : 由图 3的校园能源社区系统整体控制流程以及人工系统观测量
: 由图 3的校园能源社区系统整体控制流程以及人工系统观测量 归纳可得, 人工系统中涉及楼宇状态的转移、电网状态的变化、生产效率的改变、社会成本的变动四个部分, 因此, 通过分别构造对应的转移规则模型, 可实现整体系统状态转移规则的求解.具体如下:
归纳可得, 人工系统中涉及楼宇状态的转移、电网状态的变化、生产效率的改变、社会成本的变动四个部分, 因此, 通过分别构造对应的转移规则模型, 可实现整体系统状态转移规则的求解.具体如下:
1) 楼宇状态转移规则 :在人工系统中, 存在
:在人工系统中, 存在  , 其中
, 其中 为各楼宇对应的状态参数.由于在本案例中, 楼宇状态变量客观存在, 故楼宇状态转移规则
为各楼宇对应的状态参数.由于在本案例中, 楼宇状态变量客观存在, 故楼宇状态转移规则 已知, 无需再进行求解.
已知, 无需再进行求解.
2) 校园电网状态变化模型:为在人工系统中描述楼宇负荷变化对校园电网运行及实时电价的影响, 结合电力系统机理模型进行相关建模求解, 具体为依托电力系统仿真软件, 采用基于交流电力最优潮流的配网节点边际实时价格(Distribution locational marginal price, DLMP)进行电价的实时制定.该方法原理如文献[24−26]中所述, 不再赘述.
3) 生产效率推导模型:为建立室内温度与办公室人员工作效率的关联关系, 本案例结合相关研究, 基于计算模型, 提出人力工作绩效模型[24-26].
4) 社会成本变动模型:为描述楼宇用电情况和工作人员状态对社会成本的影响, 本案例基于计算模型, 结合前述的实时电价、工作绩效模型, 以能耗成本与人力成本的加权和形式, 构建校园楼宇对应时刻的总社会成本计算公式.
系统观测规则 :在本案例中, 人工系统观测值为各楼宇的负荷量, 楼宇负荷是楼宇状态参数的复杂函数
:在本案例中, 人工系统观测值为各楼宇的负荷量, 楼宇负荷是楼宇状态参数的复杂函数 , 故对整个人工系统的观测规则求解等同于对楼宇的观测规则
, 故对整个人工系统的观测规则求解等同于对楼宇的观测规则 求解.
求解.
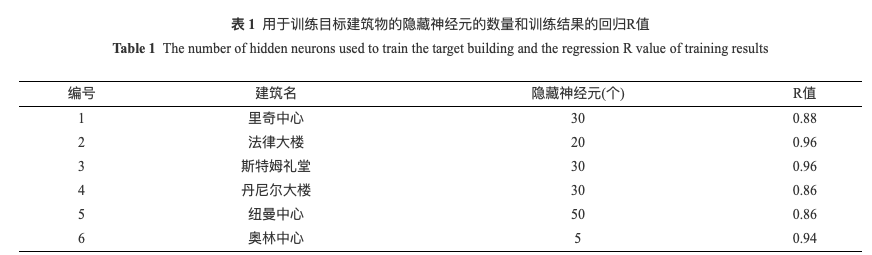
本案例采用数据驱动的方式, 基于神经网络进行楼宇观测规则的构建与表征, 即 为构建的神经网络对应的函数表达.神经网络以时序的楼宇状态参数作为输入, 以其能源消耗为输出.针对每个待研究楼宇, 使用Levenberg Marquardt反向传播算法对具有Sigmoid激励函数的隐含神经元和线性输出神经元的两层前馈网络进行训练.表 1列出了用于训练每个楼宇能耗模型的隐藏神经元的数量和训练结果的回归R值, 据统计平均R值为0.92, 这表明6个能源消耗神经网络模型是可接受的.在文献[23]中, 进一步实现了长短期记忆(Long short-term memory, LSTM)结构及门控循环单元(Gated recurrent unit, GRU)进行时序特征的深度神经网络方法提取, 实现更准确的能耗预测[23].
为构建的神经网络对应的函数表达.神经网络以时序的楼宇状态参数作为输入, 以其能源消耗为输出.针对每个待研究楼宇, 使用Levenberg Marquardt反向传播算法对具有Sigmoid激励函数的隐含神经元和线性输出神经元的两层前馈网络进行训练.表 1列出了用于训练每个楼宇能耗模型的隐藏神经元的数量和训练结果的回归R值, 据统计平均R值为0.92, 这表明6个能源消耗神经网络模型是可接受的.在文献[23]中, 进一步实现了长短期记忆(Long short-term memory, LSTM)结构及门控循环单元(Gated recurrent unit, GRU)进行时序特征的深度神经网络方法提取, 实现更准确的能耗预测[23].
控制变量 ,
, :基于上述系统状态转移规则以及系统观测规则的建模求解, 本案例中系统管控的目标方程可进一步转化为
:基于上述系统状态转移规则以及系统观测规则的建模求解, 本案例中系统管控的目标方程可进一步转化为

在本案例中,  均为每个楼宇的室内温度基准控制量, 故实际上只用求解人工系统中的控制变量, 然后直接作用于实系统即可, 无需进行虚实系统控制量之间的转换计算.
均为每个楼宇的室内温度基准控制量, 故实际上只用求解人工系统中的控制变量, 然后直接作用于实系统即可, 无需进行虚实系统控制量之间的转换计算.
社会成本函数 的构建和计算方法如图 3, 通过计算楼宇负荷、电网潮流、实时电价、生产效率函数等数值, 再加权综合计算而得到.由于
的构建和计算方法如图 3, 通过计算楼宇负荷、电网潮流、实时电价、生产效率函数等数值, 再加权综合计算而得到.由于 包含多栋楼宇的室内温度设置, 并存在与电网、工作效率等的复杂作用, 针对
包含多栋楼宇的室内温度设置, 并存在与电网、工作效率等的复杂作用, 针对 的构建、优化、求解需要设计高效智能的方法.在以往的工作中, 我们设计了集中式和分布式两种方法来实现
的构建、优化、求解需要设计高效智能的方法.在以往的工作中, 我们设计了集中式和分布式两种方法来实现 的构建以及,的求解.
的构建以及,的求解.
集中式启发性搜索:在该方法中由一个集中式的复杂非线性优化求解系统构建.但是由于求解空间和计算量太大, 需要采用启发性搜索或迭代自适应规划算法(Iterative adaptive programming, IAP)方法求解, 即每次仅更新一栋楼宇的室内温度设定值, 并遍历所有待控制楼宇, 直至控制变量中各楼宇室内温度设定值停止显著变化并收敛[25-26].
分布式的博弈论求解:考虑到各楼宇之间在温度调节过程中可能存在的利益冲突, 将楼宇间的用电行为建模为动态的非合作博弈过程, 即分布式能源供给博弈, 通过分布式虚构迭代算法(Distributed fictitious iterative, DFI)进行混合策略纳什均衡的求取[24].
作为一个示例, 我们选择一个典型的夏季周(7月25日至29日), 对6个目标楼宇进行室内温度控制, 来展示平行系统架构下校园楼宇能耗管控的效果[24-26].图 4所示为6个目标楼宇在控制期间的总体社会成本, 图中加粗实线为应用优化室内温度设定值的目标建筑物的小时总成本, 不同的标记形状表示不同的天数.此外, 我们还提供了更多的测试结果与三个基线参考温度设置进行比较, 长虚线, 短虚线与点划线分别代表室内温度设置为 ,
,  时的总成本.比较具有相同标记但不同线型的曲线, 很容易发现应用优化室内温度设定值的目标楼宇在相同天数前提下的小时总成本是最低的, 即基于平行系统架构制定的管控策略所得到的室内最优温度具有较强的可行性和有效性.
时的总成本.比较具有相同标记但不同线型的曲线, 很容易发现应用优化室内温度设定值的目标楼宇在相同天数前提下的小时总成本是最低的, 即基于平行系统架构制定的管控策略所得到的室内最优温度具有较强的可行性和有效性.
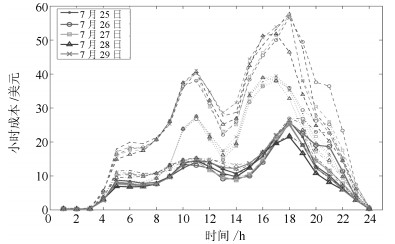
图 4 夏季场景中6个目标楼宇的总体社会成本与不同室内温度设置的比较
Fig. 4 Comparison of the total social cost of six target buildings and different indoor temperature settings in summer
6. 总结
本文旨在为平行系统及ACP方法建立一种数据驱动的数学形式表示和计算框架.借助此框架, 为虚实系统互动, "学习与训练"、"实验与评估"、"管理与控制"、AFC、"小数据-大数据-小智能"等重要的平行系统相关概念做出数学上的表示和计算方法, 并且讨论如何在数学描述上统一平行系统和数字孪生系统等概念, 以及解释它们之间的异同.
平行智能, 是本文讨论的另一个重点, 平行系统数学架构和人工智能技术相结合, 利用语言动力学和语义嵌入技术从语义空间映射到数值空间, 统一语义系统和数值系统, 从而将系统分析扩展到语义层次, 为管控复杂系统提供有力的科学和技术工具.
最后, 我们以美国某大学校园楼宇的能源管理策略制定为案例, 为文中平行系统数学表示和计算架构提供一个直观的算例, 并说明该方法在能源电力领域中的应用.
参考文献
https://blog.sciencenet.cn/blog-2374-1267912.html
上一篇:[转载]【学会通讯】中国自动化学会通讯 2020年12月第6期(第41卷 总第213期)发布
下一篇:[转载]《智能科学与技术学报》专刊征文:智能交通系统与应用(截稿时间:2021年4月15日)