博文
基于水下传感器网络的目标跟踪技术研究现状与展望
|
水下传感器网络是指:广义的水下传感器网络(Underwater Sensor Networks,USNs)主要包括集成不同功能的传感器节点、融合中心、自主水下航行器、水下滑翔机、海面基站以及海岸基站等多个部分。
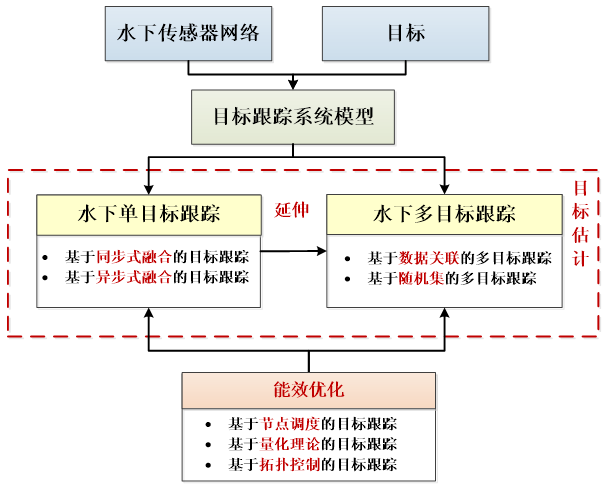
刘妹琴, 韩学艳, 张森林, 郑荣濠, 兰剑. 基于水下传感器网络的目标跟踪技术研究现状与展望. 自动化学报, 2021, 47(2): 235−251 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190886?viewType=HTML USNs的系统组成 海洋蕴含丰富的自然资源,不仅是人类社会赖以生存繁衍和社会实现可持续发展的重要战略空间,同时也是国家安全的重要保护屏障。近年来,随着世界各国对海洋资源的开发和利用,我国与周边国家在领海主权和海洋资源开发等方面的竞争日益激烈,水下目标跟踪技术作为海洋科学技术的重要研究方向之一,在军事领域和民用领域都起到了至关重要的作用。例如: (1)军事领域:通过快速获取敌方目标的位置、速度、加速度等状态信息,可以有效防御和打击敌方入侵的舰船、鱼雷、潜艇以及水下机器人等。 (2)民用领域:在水下目标的搜救、水下机器人的智能控制、海洋生物资源的保护等方面都发挥着重要作用。 水下目标跟踪是指利用不同种类的一个或多个传感器所获得的不同量测信息(距离、方位等)通过滤波算法对目标的状态(速度、位置等)在时间上进行连续地估计与预测。传统的水下目标跟踪技术主要有基于声呐图像的目标跟踪和基于声呐阵列的目标跟踪。基于声呐图像的目标跟踪不仅可以获得有关目标的位置、速度等运动信息,而且可以通过声成像获得的视频和图像信息提供有关目标的视觉信息,如形状、纹理以及边界等。但是,它受水体环境因素的影响比较大,导致应用场景十分有限。基于声呐阵列的目标跟踪的跟踪范围和工作时间受船舶活动范围和时间的限制,而且一旦船舶出现故障或遭受攻击,整个系统将无法继续执行跟踪任务。 近年来,USNs及其相关技术的研究与应用也在世界各国掀起一股热潮。USNs不仅具有成本低廉、结构自组织、容错性强、隐蔽性强以及快速部署等优势,而且它采用分布式部署的方式,可以实时、连续、全天候地获得多维度、互补性的目标量测信息,使得对目标的探测与跟踪不再受空间和时间的约束。通过各节点之间的信息共享和协同工作,USNs还可实现较高的目标跟踪精度。基于USNs的水下目标跟踪主要具有以下几点优势: (1)跟踪系统更可靠; (2)跟踪范围更广; (3)跟踪更及时; (4)跟踪精度更高; 但是,由于水下环境的复杂多变,基于USNs的水下目标跟踪技术也面临诸多挑战,如通信时延较高、通信带宽受限、杂波和多径效应严重、量测丢失、网络的能量资源有限等。虽然针对陆上WSNs的目标跟踪技术已经相当成熟,但考虑到USNs的特殊性,陆上的目标跟踪算法并不能直接应用到USNs。因此,研究切合USNs特点的水下目标跟踪算法具有极其重要的应用价值和战略意义。 本文对基于USNs的水下目标跟踪技术进行综述,分别从水下传感器网络、水下目标跟踪模型、水下单目标跟踪技术、水下多目标跟踪技术以及水下目标跟踪中的高能效措施几个角度进行阐述: (1)简要介绍了USNs硬件平台的建设概况及其系统组成和分类, (2)介绍了水下目标运动模型和量测模型的构建以及环境对模型构建造成的影响; (3)从同步式融合和分布式融合两个方面来论述基于USNs的单目标跟踪技术,并比较了两种融合方式的优缺点; (4)再次详细讨论了数据关联和随机有限集两种方法目前在基于USNs的多目标跟踪中的应用情况及其存在的问题; (5)针对USNs面临的能耗问题,综述了目前已有的能效优化措施,并对各种方法的基本原理、适用性以及存在问题进行了详细的总结; (6)最后指出了基于USNs的目标跟踪目前存在的挑战,并对未来的发展方向进行了展望。 基于USNs的水下目标跟踪技术 作者简介 刘妹琴 浙江大学工业控制技术国家重点实验室和电气工程学院教授. 主要研究方向为人工智能理论与应用,海洋信息技术,信息融合,非线性控制理论与应用. E-mail: liumeiqin@zju.edu.cn 韩学艳 浙江大学电气工程学院博士研究生. 主要研究方向为目标跟踪,多传感器网络,信息融合,方位估计. E-mail: xueyanhan@zju.edu.cn 张森林 浙江大学电气工程学院教授. 主要研究方向为水下无线传感器网络,信息融合,纺织自动化. E-mail: slzhang@zju.edu.cn 郑荣濠 浙江大学电气工程学院副教授. 主要研究方向为多机器人系统,协同控制与优化,海洋信息技术. E-mail: rzheng@zju.edu.cn 兰 剑 西安交通大学自动化科学与工程学院教授. 主要研究方向为信息融合理论与技术. E-mail: lanjian@mail.xjtu.edu.cn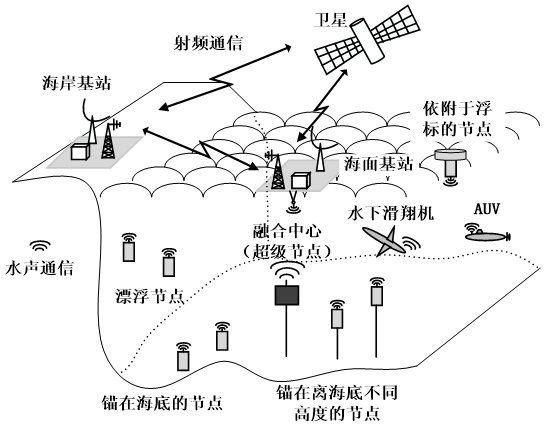
https://blog.sciencenet.cn/blog-3291369-1280784.html
上一篇:《自动化学报》2021年47卷3期目录分享
下一篇:直播预告‖自动化前沿热点讲堂之第十二讲