博文
关于《追问人工智能》的思考梳理
||
关于《追问人工智能》的思考梳理
王小凤
摘要:笔者对于人机融合智能有很多困惑,希望从打破困惑这一角度出发梳理《追问人工智能》一书,对现在人工智能的瓶颈和关键点有一个全面的了解,进而找到自己在人机融合智能研究中的着手点。本书中贯穿始终的思路是从人工智能与人类智能的对比中发现人工智能的缺陷,并尝试解决这些缺陷。人工智能的局限性导致人工智能的道路是有限的,因而本书提到未来是人机融合智能,而人机融合智能的切入点是深度态势感知。另外,本书在教育、军事、游戏等方面上对人工智能都有重点讨论。
关键词:人机融合智能、人工智能、深度态势感知
一、智能的源头:从人与机说起
从智能的源头就可以找到人工智能与人类智能的根本区别之所在。
1.1人工智能和人类智能的思维差异
1.人工智能的起点,是“being”,即存在,客观的物质。人的智能,还存在着“should”,即意识。
2.人有“want”,即想干什么;而机器不会“want”。
3.人有“can”的问题,即能做还是不能做。机器没有这个问题。
4.“change”:人会不断改变,而机器不会改变,只能按部就班。
以上内容用“being”、“should”、“want”、“can”、“change”等五个词解释了人工智能和人类智能的思维差异,这也是人工智能在一定程度上无法同人类智能相比的根源。
1.2现有人工智能的缺陷与优势
本书主要从两个方面讲现有人工智能还不够智能的原因:一个是基本的哲学层面,另一个是具体实现过程层面(鉴于此层面知识分散在各个章节,笔者在阅读的过程中有把涉及的问题具体归类)。
基本的哲学层面的问题就是关于那几对矛盾:形式化与意向性,计算与算计,事实与价值等等。机器还存在一个哲学层面的先天不足回答不了“休谟之问”。从这个层面看,人工智能的核心和瓶颈在于形式化/计算/事实与意向性/算计/价值的有机结合。
具体操作过程的问题就是输入、处理、输出决策、反思反馈中存在的问题,而这些具体操作过程涉及到的问题也是以上哲学矛盾的具体体现。输入表征中现有人工智能没有情感、常识、恒定表征、默会虚拟参照系统、感知外部前提条件变化、对各种知识(陈述性、程序性、默会)的表征等问题,处理中现有人工智能没有顿悟冥想,不能处理灵活可以改变的、带有矛盾性的事物以及数学的多指向性等问题。决策中现有人工智能不可以像人类智能那样通过直觉经验进行决策,也不能实现不完全信息决策,反思反馈中现有人工智能的反思不能产生出各种隐喻(人类特有的能力)。
但是人工智能也有人类智能无法比拟的优势,例如:存储量大;计算速度快,精确;像“阿尔法狗”搜索与前瞻能力强。从以上讨论中不难发现,人主要的优势是解决非定义域问题,机器主要的优势是定义域问题。
1.3机器学习与人的学习对比
1.机器基于大量的正确样本进行训练。人类基于少量的正确或错误样本进行学习。
2.机器容易产生局部最优、调参很难。人类把握整体最优、调参相对比较自如。
二、未来是人机融合智能
从以上讨论中不难发现:人工智能的道路是有限的,人机融合智能才是当今智能时代的最佳解决方案。人机融合智能就是充分利用人和机器的长处形成一种新的智能形式。人工智能源自形式逻辑框架,人类智能脉于辩证思维体系,人机融合智能的根本在于逻辑与非逻辑思想的结合。
人机融合智能是人、机、环境三者的交互统一。人机环境这三个事物之间是石头剪子布的关系:人造机器 + 机器改造环境 + 环境塑造人,其中这个环境不单是自然环境,而且还包括社会伦理环境、商业环境、科技环境等一系列的环境,这个机它也不单单是指机器装备,还包括了机制管理等,这个人也分很多种,如单人、多人等。人、机、环境就构成了一个完整的系统工程体系,人、机、环境之间的交互作用和关系也是各种智能产生的源泉和所在。
三、态势感知是人机融合智能的切入点
我们将态势感知中的“态”定义为人-机-环境系统中的各类表征个体状态的主客观数据,即state;将“势”定义为事件的发展趋势,即trend;将“感”定义为对系统中“态”的觉察,即sense;将“知”定义为对“势”的理解。
3.1三级态势感知模型
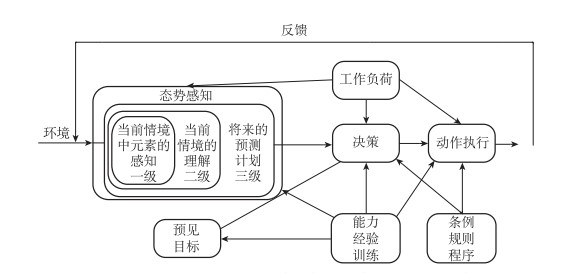
美国空军首席科学家米卡·安德斯提出的态势感知模型(如上图)被分成三级:第一级是对环境中各成分的感知,即信息的输入;第二级是对目前的情境的综合理解,即信息的处理;第三级是对随后情景的预测和规划,即信息的输出。
在第三级智能预测系统中,存在以下问题:如何把非概念问题概念化?如何把异构问题同构化?如何把不可靠的部件组成可靠的系统?……图灵奖及诺贝尔经济学奖得主西蒙提出了聪明的对策:有限的理性,即把无限范围中的非概念、非结构化成分可以延伸成有限时空中可以操作的柔性的概念、结构化成分处理,这样就可把非线性、不确定的系统线性化、满意化处理。
3.2深度态势感知的含义
深度态势感知的含义是“对态势感知的感知,是一种人机智慧,既包括了人的智慧,也融合了机器的智能”,是能指+所指,既涉及事物的属性(能指、感觉),又关联它们之间的关系(所指、知觉),既能够理解事物原本之意,也能够明白弦外之音。
“态”就是先天已存在的事物发展惯性,“势”就是后天未存在的事物发展惯性,感知就是要理解态、势。深度态势感知就是深度理解态、势。态是事实空间,势是价值空间,感是事实获得,知是价值关系。关于深度态势感知虚实参照系,我们可分为人机不同的态(事物)参照系、势(事实)参照系、感(显著)参照系、知(价值)参照系,当这些虚实参照系大部分一致起来时,抑或是没有本质的矛盾时,才有可能产生正确的觉察和决策行为。
3.3建立深度态势感知公式
从态空间进入势空间,就是从数据特征空间进入信息向量空间,就是从逻辑空间进入非逻辑空间,就是从形式空间进入意向性空间,也即从语法空间进入语义空间,这种不同空间的进入所产生的误差表达公式,就是我们要建立的深度态势感知公式。
四、对人机融合智能问题的梳理
以下是对书中人机融合智能关键问题的梳理,笔者认为研究人机融合智能需要从以下问题找突破口,这也是梳理的必要性。
如何使机器产生感知外部前提条件的变化,并依次而随机应变,是人机融合的一大障碍;人既有确定性的一面,也有不确定性的一面,机(机器、机制)同样如此,如何把不确定性的一面转为相对稳定的确定性加以使用,这是人机融合的一个重要问题;抽象符号间的联系不能产生知识和意义,形式符号系统的语义解释和知识建构如何内在于系统(类似于人类内在于我),应该是未来人工智能研究的核心问题;“反思”的目的性可用主观的价值性表征,这将成为人机融合的又一关键之处;人机之间的理论、概念、知识、信息、数据之间是弥散膨胀关系,为了不失真,它们相互之间的转换效率需要用某种方法来衡量,这些表征就是我们要寻找的关键点和突破口;人机融合的关键应包括:一多与灵活弥聚的表征、公理与非公理混合推理、直觉与“间觉”交融的决策;让机器获得联觉或迁移觉,或许是人机融合智能方面的一个瓶颈;关系有单向性(不是双向的)和依附性,如何建立起人机之间的双向关系至关重要,这是人机融合智能的一个突破口和切入点。
五、一个应用:知识推荐系统
读第六章“人工智能:寓教有方”时,笔者意识到知识推荐系统是一个很好的研究方向。在线教育火爆,它有其随时随地可以学习的优势,但是目前在线教育也存在内容不对口、材料不对口、上课方式缺乏个性化等缺点,这些缺点会导致学习体验不佳,进而导致学员在学习过程中难以进行。比如学习英语口语时,我的情况现在学习发音还是学习口语内容,如果我学习发音我现在的阶段应该是学习弱化、爆破还是连读等问题。如果我是要某个情景需要口语那我现在应该学习什么内容。如果我要长期学口语,是听课还是读材料还与外国老师交流哪个方式更适合我。这个系统如果做到因材施教可以帮助很多像我一样只会哑巴英语的人。另外,如果能实现真正的智能推荐,目前市面上所有的在线教学都会受到强烈的冲击,我们可以预测到它市场的火爆。
六、对人机融合智能研究的短暂规划
由于本书中提到:人工智能如果有一定的智能,恐怕更多应是数字逻辑语言智能;人还是定性定量才能交给机器做;归根到底,机器所能做的只是计算而已;建造有意识的智能体一定要将其置于具体环境中,首先了解情景,对情景进行辨别与选择,再发展智能与意识,这样才能离我们人类的意识越来越近;人的优势是画圈(划分领域/定义域),机的优势是画圆(精确执行),人机融合的优势则是既能画好圈又能画好圆(可跨域实现目标),正可谓人心所想,机器所为。
我们可以得出下面的结论。研究人机融合智能,要规定具体环境。对机器暂时还不能有算计上很高的期望,未来一段时间内主要利用它的计算优势。研究人机融合智能要循序渐进,充分利用人机的优势,达到比较好的智能。
七、总结与展望
读书的过程中笔者是带着能否从书中找到方法来解决关于人机融合智能中实际问题以及指导笔者接下来研究进程的思路来读这本书的,所以接下来笔者会结合本书与自己的思考来总结全文。
人工智能有专用人工智能和通用人工智能之分,也就是弱人工智能和强人工智能之分。我们目前人工智能大都属于专用人工智能,我们现在要做通用人工智能。通用人工智能也就是从以上讨论的人工智能的缺陷中找突破口。
作为人机融合智能的切入点-态势感知中,态和感描述的是事实/形式化,势和知描述的是价值/意向性,态势感知究其根本还是事实与价值的矛盾。但是矛盾只能从理论上指导我们,它解决不了实际问题。那我们接下来怎么解决人机融合智能的实际问题?
机器对彼此矛盾或含糊不清的信息不能反应。本书中也提到人还是定性定量才能交给机器来做。人擅长解决非定义域的问题,机器擅长解决定义域的问题,那么人机融合智能要充分结合人和机的优势,做到优势互补。笔者在阅读前半本书的过程中有个不成熟的想法:人告诉机器搜集哪些输入信息,甚至可以列六个维度的信息让机器去搜集,搜集到的信息要传递给人,人表征完了告诉机器怎么处理,接着机器再去处理。读后半本书的过程中,笔者意识到复杂的情景应该有人机环更多的交互统一。举个例子,军事智能中的人机合一,不是简单的“人心+机脑”,而是人(单人、多人、敌我)+机(机器装备+机制管理)+作战环境(真实+虚拟)体系的交互统一。泛泛而谈不适合研究具体智能,还容易导致思路掣肘及分散,所以我们还是要在具体情境下对具体智能探索。
本书也多次提到了研究智能体要规定情境,划好范围,所以我们接下来是不是可以从问题中突破,在具体情景问题中探索,循序渐进。另外,实践的创新也会促进理论的创新。笔者想到了一个从情境智能中研究的大概步骤:提出研究问题、自行建模有个大概思路、解决不了的问题借鉴前人的价值模型、创新自己的价值模型、解决问题。
我们怎么解决以上步骤的第一步-确定自己的研究课题?笔者认为以上讨论的人工智能不智能的每个具体涉及问题及人机融合智能的难点都可以作为课题。除此之外,笔者认为本书中还可以作为课题研究的有:情感表征、战斗机/半自主武器、机器读懂文字的语义、弥补辩证逻辑。
辩证思维逻辑就是可以灵活表征、非单调推理、直觉决策、随机应变、准确有效及时的护理人-机-环境复杂系统问题的一种思维方法。阅读到这里的时候笔者就认为辨证思维逻辑或许是人机融合智能研究的突破口,如果可以自己定义其规定和内涵来弥补数学和逻辑理论的不完备性,在沟通事实-价值这一基本矛盾上肯定会更加平滑。
智能是强逻辑战术性的,侧态、感,时间短、空间小、价值低
智慧是弱逻辑战略性的,重势、知,时间长、空间大、价值高
https://blog.sciencenet.cn/blog-40841-1243785.html
上一篇:追问人机融合智能:从北京到剑桥
下一篇:再读《追问人工智能》一书