博文
深海起重机系统的实时轨迹规划方法
|
引用本文
王岳, 孙宁, 吴易鸣, 梁潇, 陈鹤, 方勇纯. 深海起重机系统的实时轨迹规划方法. 自动化学报, 2021, 47(12): 2761−2770 doi: 10.16383/j.aas.c200262
Wang Yue, Sun Ning, Wu Yi-Ming, Liang Xiao, Chen He, Fang Yong-Chun. Real-time motion planning of deep sea-oriented flexible crane systems. Acta Automatica Sinica, 2021, 47(12): 2761−2770 doi: 10.16383/j.aas.c200262
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c200262?viewType=HTML
文章简介
关键词
在21世纪, 社会发展伴随着快速增长的资源需求, 为开采丰富的海洋资源, 海洋工程领域日益受到全球各国关注. 在这种情况下, 积极发展海洋装备设施技术至关重要. 深海起重机在海洋工程中扮演着重要角色, 例如海底隧道的搭建、跨海桥梁等项目中水下吊装作业和水下补给等任务. 因此, 针对深海起重机的研究具有非常重要的实际意义.
近年来, 轨迹规划方法成为解决欠驱动系统控制问题的常用方法, 用轨迹规划解决起重机控制问题也逐渐一般化, 此类方法可看作从系统输入到输出的一种解, 通过考虑具体的控制目标, 将已知参数与期望轨迹作为系统输入, 并将可驱动状态量(如桥式起重机的台车位移、速度、加速度)的时间序列作为系统输出. 根据实际需求, 规划所得轨迹可对系统能耗、运输效率等指标进行优化, 同时还能够保证吊运的平稳性和准确性.
迄今为止,现有的针对陆地起重机系统的轨迹规划方法均需离线进行, 无法很好地实现对系统的实时规划/控制, 因此, 在一些对实时性要求较高的场合, 现有离线规划方法便不再适用. 并且现有轨迹规划方法均是针对陆地起重机系统设计的, 在水下环境中(存在水流影响)往往难以直接适用. 除此之外, 大多现有的轨迹规划方法均将复杂非线性系统的模型线性化, 当负载摆动较大导致线性化条件不成立时便无法保证控制性能.
因此, 本文在未对复杂非线性模型线性化的前提下, 考虑水流作用, 为深海起重机系统设计了一种结构简单、参数易于调整的新型轨迹.
本文主要贡献如下:
1) 针对深海起重机系统, 提出了一种新型实时轨迹规划方法, 该方法基于非线性系统模型, 无需线性化近似;
2) 通过理论分析与仿真结果, 均证明了所提方法可使台车精确定位, 有效抑制负载摆动, 且对外部干扰有较强的鲁棒性, 同时也具有实时性, 可根据不同目标位置在线调整规划轨迹;
3) 该方法结合深海起重机系统在水下的作业环境, 考虑了在水流干扰下负载(如核燃料棒)呈现出的柔性特性.
深海起重机系统动力学模型
图1是二维空间中深海起重机系统示意图, 其中在惯性坐标系iOj中,x(t)表示台车位移,u(t)表示驱动台车的控制输入.I表示截面惯性矩. 定义柔性负载与台车连接端在i方向上的位置为i=0, 负载自然状态下原长为l,w(y,t)表示在时刻t及i方向上i=y处负载元的横向偏差(即负载摆动),fw(y,t)表示负载对应位置受到的水作用力. 系统参数如表1所示.

轨迹规划
为实现上述控制目标, 本节将提出具体的实时轨迹规划方法, 并给出相应的理论分析.
仿真结果与分析
为验证所提轨迹规划方法的有效性, 本节使用MATLAB进行数值仿真, 首先说明了应用本文所提方法前后负载振动幅度的变化, 接着测试了在有外部扰动(初始扰动与中间扰动)、多次变换目标位置、与已有轨迹规划方法相比较三种设定情况下的轨迹跟踪消摆性能.
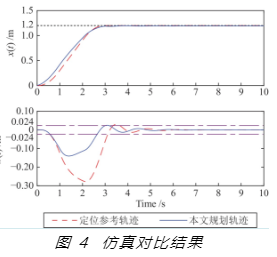
由一系列仿真结果可知, 本文所提实时消摆轨迹可在使台车快速、准确到达目标位置的同时, 较好地抑制柔性负载摆动.
结论
基于深海柔性起重机系统可驱变量与不可驱变量间的非线性耦合关系, 本文提出一种实时轨迹规划方法, 该方法不仅能实现台车精确定位, 有效抑制负载摆动, 而且对外部干扰有较强的鲁棒性, 同时也可根据不同目标位置实时调整规划轨迹, 具有实时性. 经过理论分析, 证明了系统各变量的收敛性, 且仿真结果也验证了所设计轨迹良好的消摆控制性能. 在今后的研究中, 将进一步缩小定位参考轨迹的选择范围(例如可以优先选择结构形式简单、参数数量少、阶次低的表达式作为定位参考轨迹), 并将实时规划方法推广到其他欠驱动系统.
请点击左下角“阅读原文”了解更多! 作者简介 王 岳 南开大学机器人与信息自动化研究所硕士研究生. 主要研究方向为欠驱动控制系统. E-mail: yuew@mail.nankai.edu.cn 孙 宁 南开大学机器人与信息自动化研究所教授. 主要研究方向为欠驱动机器人(包括各类吊车), 气动人工肌肉等系统的控制及应用. 本文通信作者. E-mail: sunn@nankai.edu.cn 吴易鸣 南开大学机器人与信息自动化研究所博士研究生. 主要研究方向为欠驱动控制系统. E-mail: ymwu@mail.nankai.edu.cn 梁 潇 南开大学机器人与信息自动化研究所讲师. 主要研究方向为无人机系统的运动规划和非线性控制. E-mail: liangx@nankai.edu.cn 陈 鹤 河北工业大学人工智能与数据科学学院讲师. 主要研究方向为机电一体化控制, 桥式起重机和轮式移动机器人. E-mail: chenh@hebut.edu.cn 方勇纯 南开大学机器人与信息自动化研究所教授. 主要研究方向为非线性控制, 视觉伺服, 欠驱动系统控制和基于原子力显微镜的纳米系统. E-mail: fangyc@nankai.edu.cn 相关文章 [1] 刘殿通, 易建强, 谭民. 一类非线性系统的自适应滑模模糊控制. 自动化学报, 2004, 30(1): 144−150 http://www.aas.net.cn/article/id/16376?viewType=HTML [2] 魏萃, 柴天佑, 贾瑶, 王良勇. 补偿信号法驱动的Pendubot自适应平衡控制. 自动化学报, 2019, 45(6): 1146-1156. doi: 10.16383/j.aas.2018.c170583 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c170583?viewType=HTML [3] 赖旭芝, 张镇, 吴敏. 欠驱动三连杆机械臂能量解耦控制策略. 自动化学报, 2011, 37(1): 67−73 doi: 10.3724/SP.J.1004.2011.00067 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2011.00067?viewType=HTML [4] 武宪青, 徐可心, 张益波. 基于输出反馈的欠驱动TORA系统的有界输入控制. 自动化学报, 2020, 46(1): 200-204. doi: 10.16383/j.aas.c180625 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180625?viewType=HTML [5] 于欣波, 贺威, 薛程谦, 孙永坤, 孙长银. 基于扰动观测器的机器人自适应神经网络跟踪控制研究. 自动化学报, 2019, 45(7): 1307-1324. doi: 10.16383/j.aas.c180222 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180222?viewType=HTML [6] 陈鹤, 方勇纯, 孙宁, 钱彧哲. 基于伪谱法的双摆吊车时间最优消摆轨迹规划策略. 自动化学报, 2016, 42(1): 153-160. doi: 10.16383/j.aas.2016.c150307 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2016.c150307?viewType=HTML [7] 曹海昕, 郝运嵩, 林静正, 卢彪, 方勇纯. 绳长时变情况下轮胎式集装箱起重机非线性防摆控制算法. 自动化学报, 2021, 47(8): 1876-1884. doi: 10.16383/j.aas.c200859 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c200859?viewType=HTML [8] 张宇, 李芦钰, 郭源博, 张晓华. 基于θ-D方法的欠驱动TORA系统非线性最优控制. 自动化学报, 2020, 46(7): 1401-1410. doi: 10.16383/j.aas.c180032 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180032?viewType=HTML [9] 欧阳慧珉, 王健, 张广明, 梅磊, 邓歆. 基于新型滑模算法的双摆旋转起重机消摆跟踪控制. 自动化学报, 2019, 45(7): 1344-1353. doi: 10.16383/j.aas.c180452 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180452?viewType=HTML [10] 何博, 方勇纯, 卢彪. 针对输入时滞的桥式起重机鲁棒控制. 自动化学报, 2019, 45(6): 1065-1073. doi: 10.16383/j.aas.2018.c170506 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c170506?viewType=HTML [11] 尹伟, 孙雷, 王萌, 刘景泰. 针对串联弹性驱动器抖动抑制的轨迹规划和跟踪控制. 自动化学报, 2018, 44(8): 1436-1445. doi: 10.16383/j.aas.2017.c170170 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2017.c170170?viewType=HTML [12] 凌杰, 明敏, 冯朝, 肖晓晖. 多轴运动系统非线性轮廓重复跟踪的主从交叉耦合迭代学习控制. 自动化学报, 2017, 43(12): 2127-2140. doi: 10.16383/j.aas.2017.c160725 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2017.c160725?viewType=HTML [13] 武宪青, 何熊熊. 欠驱动RTAC系统的自适应耦合控制器设计. 自动化学报, 2015, 41(5): 1047-1052. doi: 10.16383/j.aas.2015.c140618 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2015.c140618?viewType=HTML [14] 胡洲, 王志胜, 甄子洋. 带输入饱和的欠驱动吊车非线性信息融合控制. 自动化学报, 2014, 40(7): 1522-1527. doi: 10.3724/SP.J.1004.2014.01522 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2014.01522?viewType=HTML [15] 王鹏程, 方勇纯, 江紫亚. 一种直接基于摆角约束的欠驱动桥式吊车轨迹规划方法. 自动化学报, 2014, 40(11): 2414-2419. doi: 10.3724/SP.J.1004.2014.02414 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2014.02414?viewType=HTML [16] 黄静, 李传江, 马广富, 刘刚. 基于广义逆的欠驱动航天器姿态机动控制. 自动化学报, 2013, 39(3): 285-292. doi: 10.3724/SP.J.1004.2013.00285 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.00285?viewType=HTML [17] 胡江平, 刘志新, 王金环, 王琳, 胡晓明. 多智能体系统的估计、干预及非线性耦合算法. 自动化学报, 2013, 39(11): 1796-1804. doi: 10.3724/SP.J.1004.2013.01796 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.01796?viewType=HTML [18] 贾鹤鸣, 张利军, 程相勤, 边信黔, 严浙平, 周佳加. 基于非线性迭代滑模的欠驱动UUV三维航迹跟踪控制. 自动化学报, 2012, 38(2): 308-314. doi: 10.3724/SP.J.1004.2012.00308 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2012.00308?viewType=HTML [19] 尚芳, 刘允刚, 张桂青, 张承慧. 一类非线性系统输出反馈自适应扰动抑制. 自动化学报, 2011, 37(12): 1530-1536. doi: 10.3724/SP.J.1004.2011.01530 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2011.01530?viewType=HTML [20] 孙宁, 方勇纯, 王鹏程, 张雪波. 欠驱动三维桥式吊车系统自适应跟踪控制器设计. 自动化学报, 2010, 36(9): 1287-1294. doi: 10.3724/SP.J.1004.2010.01287 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2010.01287?viewType=HTML [21] 何玉庆, 韩建达. 一类非线性欠驱动移动系统的加速度反馈增强的H∞扰动抑制控制. 自动化学报, 2008, 34(5): 558-564. doi: 10.3724/SP.J.1004.2008.00558 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2008.00558?viewType=HTML [22] 段学超, 仇原鹰, 盛英. 平面二级倒立摆的圆周行走与镇定控制. 自动化学报, 2007, 33(12): 1337-1340. doi: 10.1360/aas-007-1337 http://www.aas.net.cn/cn/article/doi/10.1360/aas-007-1337?viewType=HTML [23] 朱江滨, 易建强. 非线性欠驱动系统的实时控制. 自动化学报, 2004, 30(1): 131-136. http://www.aas.net.cn/cn/article/id/16357?viewType=HTML [24] 王伟, 易建强, 赵冬斌, 刘殿通. 桥式吊车系统的分级滑模控制方法. 自动化学报, 2004, 30(5): 784-788. http://www.aas.net.cn/cn/article/id/16252?viewType=HTML [25] 赖旭芝, 蔡自兴, 吴敏. 一类欠驱动机械系统的模糊与变结构控制. 自动化学报, 2001, 27(6): 850-854. http://www.aas.net.cn/cn/article/id/16403?viewType=HTML [26] 马晓军, 文传源. 交叉耦合非线性系统的输出调节. 自动化学报, 1996, 22(6): 701-707. http://www.aas.net.cn/cn/article/id/17106?viewType=HTML
https://blog.sciencenet.cn/blog-3291369-1337747.html
上一篇:一种改进的特征子集区分度评价准则
下一篇:多子群的共生非均匀高斯变异樽海鞘群算法