博文
基于凸近似的避障原理及无人驾驶车辆路径规划模型预测算法
|
引用本文
韩月起, 张凯, 宾洋, 秦闯, 徐云霄, 李小川, 和林, 葛建勇, 王天培, 刘宏伟. 基于凸近似的避障原理及无人驾驶车辆路径规划模型预测算法. 自动化学报, 2020, 46(1): 153-167. doi: 10.16383/j.aas.2018.c170287 HAN Yue-Qi, ZHANG Kai, BIN Yang, QIN Chuang, XU Yun-Xiao, LI Xiao-Chuan, HE Lin, HE Lin, GE Jian-Yong, WANG Tian-Pei. Convex Approximation Based Avoidance Theory and Path Planning MPC for Driver-less Vehicles. ACTA AUTOMATICA SINICA, 2020, 46(1): 153-167. doi: 10.16383/j.aas.2018.c170287 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c170287?viewType=HTML 文章简介 关键词 无人驾驶车辆, 路径规划, 凸近似, 避障原理, 模型预测控制 摘 要 提出了一种改进的无人驾驶车辆路径规划方法, 并搭建了相应的软件在环实时仿真系统, 对方法在结构化道路下的复杂动态交通工况进行性能验证.首先, 引入基于凸近似的避障原理, 对障碍物参考点的选取进行优化, 扩大了路径规划的可行域范围.采用改进后的方法, 并结合模型预测控制(Model predictive control, MPC)原理和曲线坐标系统, 综合考虑自车及障碍车的外形、道路几何约束及自车的机械结构约束、路径最短、侧向加速度、道路对中、逐次变道、车距安全度、左变道优先和前轮转角变化率等权重的影响, 实现了车辆在复杂动态交通工况下的路径规划.最后, 以长城H7运动多用途车作为无人驾驶实验及仿真平台, 搭建基于dSPACE多核架构的Carsim + Simulink软件在环实时仿真系统, 对算法进行验证.结果表明, 所提出的方法不仅可获得合理、平滑的行驶路径, 顺利避开运动障碍车的干扰, 而且具有良好的实时性. 引 言 无人驾驶技术不仅可以降低人为的交通事故, 减少拥堵现象的发生, 并且可以提高能源的利用率, 是未来的汽车重要技术发展趋势之一. 经过国内外数十年的研究, 无人驾驶技术正由驾驶辅助过渡到全自主驾驶技术的阶段. 作为无人驾驶的关键技术之一: 路径规划, 是从起点到终点找到一条无碰撞的可行驶路径.路径规划包括全局和局部两种.全局路径规划主要为局部路径规划提供导向约束, 使车辆沿着导航系统提供的一系列期望局部目标点行驶. 而局部路径规划是在车辆沿期望路径行驶时, 通过车载传感器感知周围环境及交通信息, 从而实现车道保持、动态避障等功能.后者对算法的实时性要求较高. 由于目前在全局规划算法方面的研究已经获得较为成熟的结果, 本文将主要针对动态交通环境下的复杂工况局部路径规划进行研究. 目前, 在无人驾驶车辆局部路径规划领域主要有人工势场法(Artificial potential field, APF)、滚动优化法、栅格法和插值曲线等4类方法. Khatib在惩罚函数的基础上引入了APF的概念. APF法使用排斥力场和吸引力场两个力场的叠加, 引导移动机器人完成路径规划任务.现有关于APF法应用于移动机器人路径规划的研究热点, 主要集中在通过对引力势函数与斥力势函数的优化和改进, 来解决APF法局部极小点问题. 文献[6]使用虚拟障碍法解决局部极小问题, 并针对路径抖动问题, 提出将机器人到障碍物的安全距离加入到斥力函数中, 改善了路径规划的效果. 文献[7]提出一种基于APF的动态安全预警区域, 有效地提高了远程机器人遥操作的安全. 栅格(Grid)法是由Howden提出, 通过将规划空间分解成一系列的网络单元, 并赋予一定通行因子后, 路径规划问题就变成在栅格网上, 使用启发式算法(比如由Dijkstra算法发展来的A*)或遗传算法等寻求最优路径的问题. 滚动优化法属于预测控制理论中的一种次最优方法. 文献[10]以滚动方式进行在线规划, 研究了全局环境未知时机器人的路径规划问题.文献[11]针对移动机器人基于行为的导航问题, 将最小二乘法和机器学习思想引入到基于滚动窗口的路径规划方法中, 加强了未知环境中机器人导航的准确性. 文献[12]提出一种基于实时避障和运动规划的滚动窗口全局路径规划方法. 文献[13-14]提出了基于凸近似的避障原理, 并采用分布式线性时变模型预测控制(Model predictive control, MPC)方法, 实现了无人机队的编队避障飞行控制. 文献[15]受弹性带方法[16]的启发, 提出一种凸弹性平滑(Convex elastic smoothing)方法, 即在一条已知的参考轨迹周边构成一条避障管道(Collision-free tube), 并基于此管道对参考轨迹分成两个凸问题分别进行优化, 即: 固定速度, 优化参考轨迹形状; 进而, 固定优化的形状, 进一步优化速度. 然而, 该方法的前提是通过一些路径规划方法(比如改进的微分Fast marching trees (FMT)方法)预先获得参考轨迹, 其主要目的是优化参考轨迹的形状和速度, 以获得实时的优化方法. 此外, 文献[15]仅对几种静态障碍物的避障进行了性能仿真验证, 虽然其每个迭代的优化周期耗时基本上<200 ms, 达到实时性要求, 但该耗时并不包括参考轨迹的获取. CMU的无人驾驶实验室在这一领域做了大量的前沿性研究工作, 探讨了基于动态交通信息的无人驾驶路径和速度规划问题.通过考虑曲线道路模型、障碍物、速度/加速度等约束, 将路径规划分解成多个子模块的耦合优化问题.其中, 将路径规划分为换道、横向避障策略和纵向(即速度)避障策略三个子模块进行考虑, 并使用动态规划方法进行优化, 获得了不错的效果.但其使用的仍是机器人常用的运动学模型, 而忽略了车辆行驶的动力学影响.此外, 其避障时, 将自车膨胀为一个包含了自车最大外形尺寸的轮廓圆, 显然这对自车做了较大的冗余. 基于插值曲线的路径规划方法是近年出现的新方法, 如B样条曲线、贝塞尔曲线、高阶多项式曲线、回旋曲线等.随着定位和导航技术越来越精确, 可以提供此类算法所需的准确路径点, 因此得以大量推广. 参加DARPA城市挑战赛的斯坦福大学无人驾驶团队最近与奥迪汽车合作开发的自动驾驶车辆, 其路径规划算法主要采用回旋曲线的方法. 文献[26-28]采用高次曲线的拟合方法, 实现非结构化道路下, 静态障碍物的局部路径规划. 此类算法生成的轨迹是连续的, 在路径的平滑度、舒适性、稳定性、车辆运动学和动力学约束上有较好的优势. 但此类算法忽视了避障过程中交通环境变化的问题, 即无法应对动态的障碍物干扰. 本文以障碍物动态干扰下的结构化道路路径规划为目标, 首先基于凸近似的避障原理, 对障碍物参考点的选取进行优化, 以扩大路径规划的可行域范围. 在此基础上, 结合MPC算法和曲线坐标系统, 建立自车的运动学和动力学模型, 以路径最短、侧向加速度、道路对中、逐次变道、车距安全度、左变道优先和前轮转角变化率等作为权重, 考虑自车及障碍车的外形、道路几何约束及自车的机械结构约束等约束条件, 导出基于MPC的路径寻优二次规划问题, 并基于序列二次规划(Sequential quadratic programming, SQP)方法进行求解. 最后, 以长城H7 SUV作为无人驾驶路径规划的实验和仿真平台, 搭建了基于dSPACE多核架构的Carsim + Simulink软件在环系统SILS (Soft-ware in loop systems). 基于SILS, 针对前方障碍物车辆为静态/动态的直道/弯道复杂道路交通工况, 验证了上述算法具有较好的实时性, 均能使自车安全、平顺、舒适地避开障碍物车辆的动态干扰, 并沿着车道线行驶.
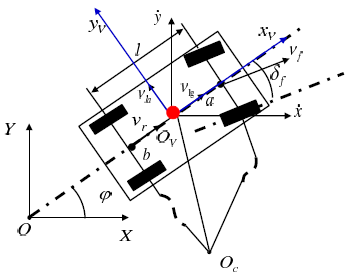
图 1 车辆模型
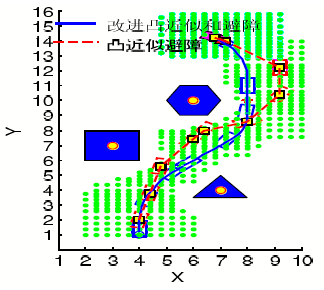
图 4 改进前后两种凸近似避障法的路径规划结果对比
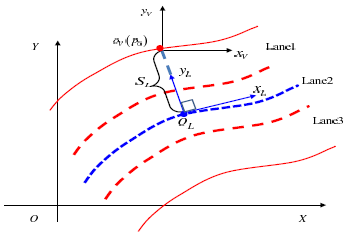
图 5 基于曲线坐标系统的车道偏移量计算原理 作者简介 韩月起 长城汽车股份有限公司技术中心智能驾驶系统开发部工程师. 2014年获得山东理工大学学士学位.主要研究为自动驾驶路径规划控制算法设计开发. E-mail: cyaqdlxkz@gwm.cn 张 凯 长城汽车股份有限公司技术中心智能驾驶系统开发部副总工程师. 2003年获得沈阳理工大学学士学位.主要研究方向为自动驾驶系统设计开发. E-mail: zhangkai@gwm.cn 宾 洋 工学博士, IEEE会员, 教授.主要研究方向为无人驾驶车辆路径规划/多传感器数据融合技术、燃料电池优化控制, 分布式混合动力电驱动系统, 电流/电压可控双向DC/DC变换器等.本文通信作者. E-mail: edward.biny@hotmail.com 秦 闯 长城汽车股份有限公司技术中心智能驾驶系统开发部工程师. 2015年获得华北水利水电大学学士学位.主要研究方向为自动驾驶路径规划算法开发. E-mail: cyaqdlxkz@gwm.cn 徐云霄 曾是长城汽车股份有限公司技术中心智能驾驶系统开发部工程师. 2014年获得燕山大学硕士学位.主要研究方向为自动驾驶路径规划算法开发. E-mail: xuyunxiao@chehejia.com 李小川 长城汽车股份有限公司技术中心智能驾驶系统开发部工程师. 2015年获得河北工业大学城市学院学士学位.主要研究方向为自动驾驶运动规划与多传感器数据融合. E-mail: xchuan.l@foxmail.com 和 林 长城汽车股份有限公司技术中心智能驾驶系统开发部主任工程师. 2006年获得吉林大学车辆工程硕士学位.曾于2006至2014年主导博世第九代ESP系统开发工作.主要研究方向为车辆底盘动态控制, 运动规划控制, 自动驾驶系统多传感器融合, 智能决策. E-mail: helin@gwm.cn 葛建勇 长城汽车股份有限公司技术中心智能驾驶系统开发部主管工程师. 2012年获得山东理工大学车辆工程学士学位.主要研究方向为底盘动力学控制及自动驾驶系统开发. E-mail: gejianyong@gwm.cn 王天培 长城汽车股份有限公司技术中心智能驾驶系统开发部主管工程师. 2012年获得北京理工大学硕士学位.主要研究方向为自动驾驶及其关键技术, 数据融合, 决策控制. E-mail: wangtianpei@gwm.cn 刘宏伟 长城汽车股份有限公司技术中心智能驾驶系统开发部工程师. 2013年获得燕山大学硕士学位.主要研究方向为自动驾驶系统嵌入式开发. E-mail: liuhongwei@gwm.cn 相关文章 [1] 姜岩, 龚建伟, 熊光明, 陈慧岩. 基于运动微分约束的无人车辆纵横向协同规划算法的研究. 自动化学报, 2013, 39(12): 2012-2020. doi: 10.3724/SP.J.1004.2013.02012 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.02012?viewType=HTML [2] 王国栋, 刘洋, 李绍松, 卢晓晖, 张邦成. 基于轮胎状态刚度预测的极限工况路径跟踪控制研究. 自动化学报. doi: 10.16383/j.aas.c190349 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190349?viewType=HTML [3] 隋振, 梁硕, 田彦涛. 考虑车辆横向主动安全的智能驾驶员模型. 自动化学报, 2021, 47(8): 1899-1911. doi: 10.16383/j.aas.c190526 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190526?viewType=HTML [4] 王浩坤, 徐祖华, 赵均, 江爱朋. 无偏模型预测控制综述. 自动化学报, 2020, 46(5): 858-877. doi: 10.16383/j.aas.c180415 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180415?viewType=HTML [5] 徐杨, 陆丽萍, 褚端峰, 黄子超. 无人车辆轨迹规划与跟踪控制的统一建模方法. 自动化学报, 2019, 45(4): 799-807. doi: 10.16383/j.aas.2018.c170431 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c170431?viewType=HTML [6] 张博, 郭戈, 王丽媛, 王琼. 基于信号灯状态的燃油最优车速规划与控制. 自动化学报, 2018, 44(3): 461-470. doi: 10.16383/j.aas.2018.c160684 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c160684?viewType=HTML [7] 夏娜, 束强, 赵青, 伊君. 基于维诺图和二分图的水面移动基站路径规划方法. 自动化学报, 2016, 42(8): 1185-1197. doi: 10.16383/j.aas.2016.c150794 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2016.c150794?viewType=HTML [8] 张继文, 刘莉, 陈恳. 面向全方位双足步行跟随的路径规划. 自动化学报, 2016, 42(2): 189-201. doi: 10.16383/j.aas.2016.c150432 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2016.c150432?viewType=HTML [9] 梁新武, 黄心汉, 王敏. 场景摄像机构型下图像空间内的无标定路径规划研究. 自动化学报, 2013, 39(6): 759-769. doi: 10.3724/SP.J.1004.2013.00759 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.00759?viewType=HTML [10] 席裕庚, 李德伟, 林姝. 模型预测控制——现状与挑战. 自动化学报, 2013, 39(3): 222-236. doi: 10.3724/SP.J.1004.2013.00222 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.00222?viewType=HTML [11] 朱毅, 张涛, 宋靖雁. 未知环境下势场法路径规划的局部极小问题研究. 自动化学报, 2010, 36(8): 1122-1130. doi: 10.3724/SP.J.1004.2010.01122 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2010.01122?viewType=HTML [12] 闫飞, 庄严, 白明, 王伟. 基于拓扑高程模型的室外三维环境建模与路径规划. 自动化学报, 2010, 36(11): 1493-1501. doi: 10.3724/SP.J.1004.2010.01493 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2010.01493?viewType=HTML [13] 徐文福, 李成, 梁斌, 刘宇, 强文义. 空间机器人捕获运动目标的协调规划与控制方法. 自动化学报, 2009, 35(9): 1216-1225. doi: 10.3724/SP.J.1004.2009.01216 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2009.01216?viewType=HTML [14] 祖迪, 韩建达, 谈大龙. 加速度空间中基于线性规划的移动机器人路径规划方法. 自动化学报, 2007, 33(10): 1036-1043. doi: 10.1360/aas-007-1036 http://www.aas.net.cn/cn/article/doi/10.1360/aas-007-1036?viewType=HTML [15] 朱庆保. 复杂环境下的机器人路径规划蚂蚁算法 . 自动化学报, 2006, 32(4): 586-593. http://www.aas.net.cn/cn/article/id/14396?viewType=HTML [16] 居鹤华, 崔平远, 崔祜祷. 行为控制月球车路径规划技术. 自动化学报, 2004, 30(4): 572-577. http://www.aas.net.cn/cn/article/id/16286?viewType=HTML [17] 孙树栋, 林茂. 基于遗传算法的多移动机器人协调路径规划. 自动化学报, 2000, 26(5): 672-676. http://www.aas.net.cn/cn/article/id/16576?viewType=HTML [18] 马保离, 宗光华, 霍伟. 非完整链式系统的路径规划--多项式拟合法. 自动化学报, 1999, 25(5): 662-666. http://www.aas.net.cn/cn/article/id/16645?viewType=HTML [19] 沈林成, 常文森. 路径规划问题的商空间表达. 自动化学报, 1995, 21(6): 713-719. http://www.aas.net.cn/cn/article/id/17214?viewType=HTML [20] 冯培恩, 孙守迁, 杨毅, 齐中伟. 采掘机器人的规划级控制技术研究. 自动化学报, 1995, 21(1): 33-39. http://www.aas.net.cn/cn/article/id/14010?viewType=HTML [21] 沈林成, 常文森. 自主车辆地形数据库和路径规划系统. 自动化学报, 1994, 20(3): 375-378. http://www.aas.net.cn/cn/article/id/14074?viewType=HTML
https://blog.sciencenet.cn/blog-3291369-1338164.html
上一篇:多级注意力传播驱动的生成式图像修复方法
下一篇:5月16日直播预告 ‖ 自动化前沿热点讲堂第十六讲