博文
通信延时环境下异质网联车辆队列非线性纵向控制
|
引用本文
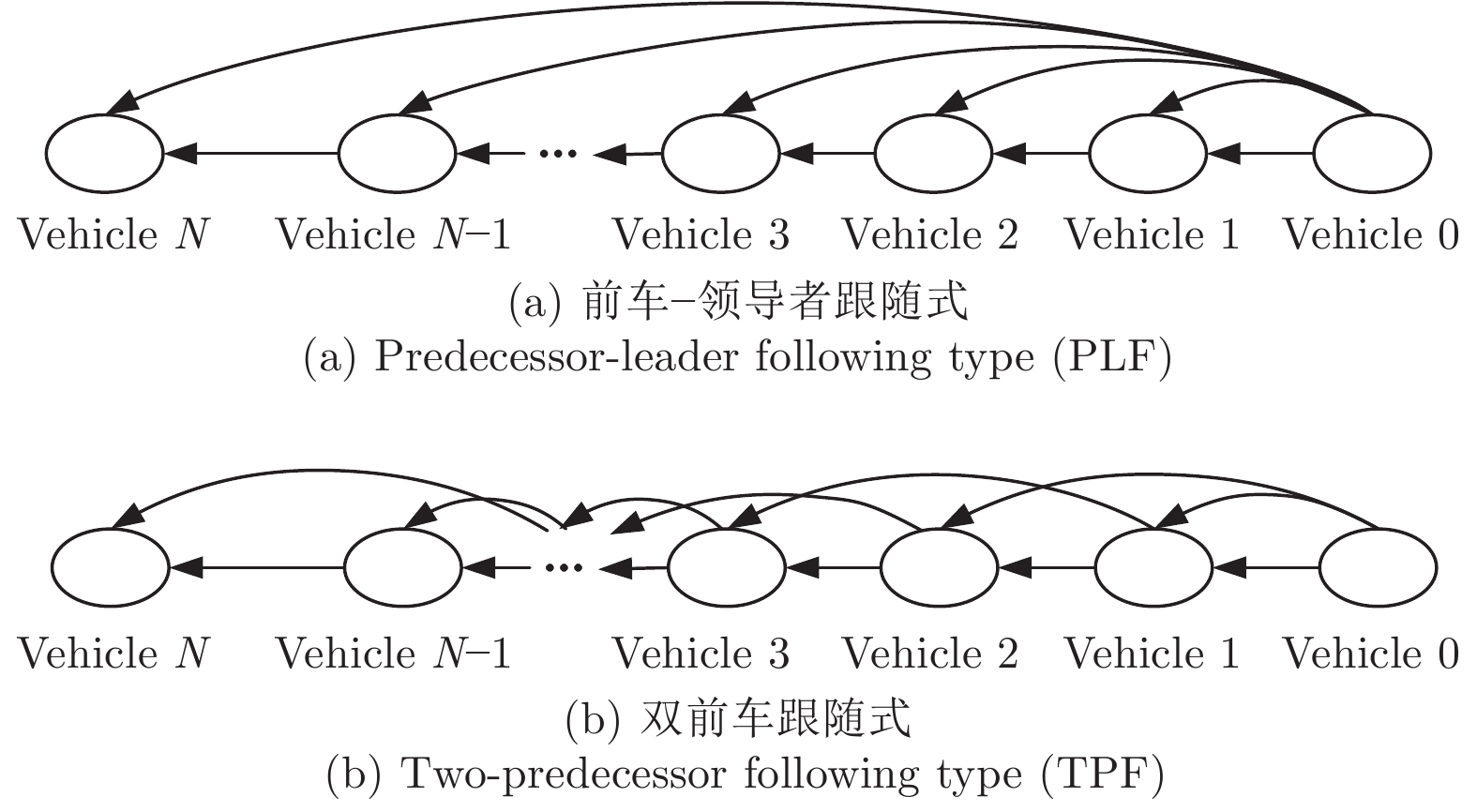
李永福, 何昌鹏, 朱浩, 郑太雄. 通信延时环境下异质网联车辆队列非线性纵向控制. 自动化学报, 2021, 47(12): 2841−2856 doi: 10.16383/j.aas.c190442 Li Yong-Fu, He Chang-Peng, Zhu Hao, Zheng Tai-Xiong. Nonlinear longitudinal control for heterogeneous connected vehicle platoon in the presence of communication delays. Acta Automatica Sinica, 2021, 47(12): 2841−2856 doi: 10.16383/j.aas.c190442 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190442?viewType=HTML 文章简介 关键词 通信延时, 异质车辆队列, 非线性控制, 一致性策略, 车辆跟驰行为 摘 要 针对通信延时环境下的异质车辆队列控制问题, 本文提出了一种基于三阶模型的分布式非线性车辆队列纵向控制器. 首先, 基于三阶动力学模型描述了车辆的异质特性. 考虑车辆跟驰行为以及异质通信延时, 提出一种通信延时环境下的异质车辆队列非线性控制器. 所提控制器不仅可以在通信延时以及车辆异质特性的影响下实现队列中车辆的位置、速度以及加速度的一致性, 而且可以有效避免负的车辆间距和不合理的加/减速度, 保证车辆的运动行为符合交通流理论. 然后, 利用Lyapunov-Krasovskii定理对车辆队列的稳定性进行分析, 得出车辆队列的稳定性条件和通信延时上界. 最后, 所提控制器的有效性和稳定性通过数值仿真得到验证. 引 言 道路交通运输是国民经济的血脉, 但现有道路基础设施难以扩展, 由于道路通行能力不足和汽车保有量迅速增加而引起的交通拥堵、尾气污染等问题使交管部门面临严峻的挑战. 随着自动驾驶技术和V2V (Vehicle-to-vehicle)通信技术的迅猛发展, 传统的自适应巡航控制ACC (Adaptive cruise control, ACC)逐渐发展成为协同自适应巡航控制 (Cooperative adaptive cruise control, CACC). 它利用V2V通信技术共享车辆状态(位置、速度、加速度)信息, 提升了车辆队列的稳定性并降低了反应延迟. 研究表明, 车辆以队列模式行驶可有效提高道路通行效率、车辆燃油经济性和行驶安全性. 因此, 从改善车辆行驶模式的角度研究车辆队列系统的控制方法, 以提高道路通行效率和车辆燃油利用率, 具有巨大的应用价值和研究意义. 车辆队列控制的目标是使队列中车辆保持等间距匀速行驶, 且要求相邻两车不能发生碰撞. 然而通信拓扑结构的改变以及通信延时或丢包的存在可能导致队列中车辆速度振荡, 从而引起队列不稳定. 诸多学者针对这一问题开展了广泛研究. 文献[5]针对Ad-hoc型车辆网络的容量限制和Bernoulli随机丢包问题, 提出了一种车辆编队算法, 解决了网络冲突并保证了车辆队列的弦稳定性. 考虑输入延时和前车间距, 文献[6]提出一种仅依靠车载传感器感知信息的车辆队列控制器, 并得出了延时边界和弦稳定性条件. 利用矩阵特征值分析方法, 文献[7]针对多种通信拓扑结构对车辆队列稳定性和扩展性进行分析, 得到了其稳定条件. 针对通信拓扑切换问题, 文献[8]提出一种考虑有限时间稳定的非线性车辆队列控制器, 实现了固定通信拓扑和切换通信拓扑下的车辆队列控制. 通过引入Markov模型描述网络的随机接入过程, 文献[9]提出一种适应信道衰落条件下的车辆队列控制算法. 文献[10]充分讨论了通信延时对几种主要车辆队列控制方法的影响, 结论表明领导车辆与跟随车辆状态信息的传递结构决定了车辆队列的弦稳定性, 而与车辆动力学和控制器设计无关. 文献[11]考虑动力传动系统延时并引入事件驱动机制提出一种适用于Ad-hoc网联车辆队列的反馈控制器. 考虑IEEE 802.11P协议真实环境下的通信延时, 文献[12]基于一致性协议提出一种车辆队列控制方法, 其分析和实验结果表明领导车辆信息的全局可达对于车辆队列的稳定性至关重要. 文献[13]考虑领导车辆的加速度扰动和风阻, 提出基于一种分层混合模型的鲁棒延时车辆队列控制器, 并保证了车辆队列的弦稳定性. 然而, 由于未考虑行车安全, 基于上述研究的车辆队列控制可能导致相邻车辆间出现碰撞问题. 从车辆队列的匀质/异质性角度来看, 许多与车辆队列控制有关的研究均假设车辆队列为匀质队列. 针对匀质车辆队列的协同控制问题, 文献[14]利用网联环境下队列中的一致性和队列间的群一致性, 提出一种新的匀质车辆多队列协同控制器. 文献[15]基于分层模糊逻辑, 提出了一种融合滑模控制和模糊控制的双层变结构控制方法. 事实上匀质车辆队列的假设过于理想化, 因为真实交通场景中车辆通常是异质的, 因此部分学者对异质车辆队列展开了研究. 考虑车辆动力学因素, 文献[16] 提出一种三阶异质车辆队列协同控制器, 并引入了基于代数黎卡提方程的综合分析方法, 得到了控制增益的稳定性区域. 针对智能车辆传感器失效和采样周期影响的问题, 文献[17]提出一种适应切换延时系统的异质车辆队列控制方法, 保证了队列行驶的一致性. 文献[18]基于事件驱动机制提出满足通信资源有效性和弦稳定性的异质车辆队列控制方法. 针对参数不确定性问题, 文献[19]基于反步法提出一种车辆队列控制策略, 同时满足队列的内部稳定和弦稳定. 利用车辆的异质特性使队列控制更加符合实际, 但交通流中车辆间的非线性相互作用的影响并未在控制器中考虑. 随着车辆队列控制理论的逐步发展, 车辆碰撞风险的研究引起了学者的关注. 文献[20]分析得出避免发生碰撞时车辆队列控制器设计应满足的四个条件, 并具体给出了几种控制因素影响下的控制器设计方法. 考虑车辆制动场景, 文献[21]提出一种积分滑模控制器, 保证车辆队列行驶过程中避免发生碰撞. 文献[22]基于二阶积分模型, 提出一种非线性车辆队列控制器, 避免了车辆间的碰撞. 然而, 上述文献并未对车辆动力学的异质特性和交通流中车辆跟驰行为对车辆队列控制的影响进行全面地描述. 本文旨在研究通信延时环境下的车辆队列协同控制方法. 考虑通信延时和车辆异质特性, 基于车辆动力学模型, 提出一种新的车辆队列非线性控制器, 并深入分析通信延时对车辆队列稳定性的影响. 本文的主要创新点包括: 1)与现有文献[6-7, 9-14, 16-20]中设计的车辆队列线性控制器不同, 本文提出一种基于车辆三阶动力学模型的非线性队列控制器; 2)本文所设计的队列控制器, 考虑了车辆间的跟驰作用关系, 避免出现负的车辆间距和不合理的加/减速度, 提高行车安全和舒适度, 保证车辆的运动行为符合交通流理论; 3)考虑了异质通信延时和异质车辆特性对车辆队列控制的影响, 并利用Lyapunov-Krasovskii定理分析得出了通信延时上界, 保证了队列行驶的稳定性. 本文结构如下: 第1节为问题描述及模型建立, 描述了车辆队列控制问题和通信拓扑结构表征并建立了车辆动力学模型; 第2节设计了考虑异质通信延时的非线性异质车辆队列协同控制器, 并进行了稳定性和通信延时上界分析; 第3节进行了不同通信拓扑结构和有/无通信延时情形下的对比数值仿真验证和分析; 第4节进行总结. 图 1 车辆队列 图 2 通信拓扑结构 作者简介 李永福 博士, 重庆邮电大学自动化学院教授, 智能空地协同控制重庆市高校重点实验室主任. 主要研究方向为智能网联汽车和空地协同控制. 本文通信作者. E-mail: liyongfu@cqupt.edu.cn 何昌鹏 重庆邮电大学自动化学院硕士研究生. 主要研究方向为车辆队列控制. E-mail: mrchangpeng@163.com 朱 浩 博士, 重庆邮电大学自动化学院副教授. 主要研究方向为智能车环境感知与信息融合. E-mail: zhuhao@cqupt.edu.cn 郑太雄 博士, 重庆邮电大学先进制造工程学院教授. 主要研究方向为车辆动力学与控制. E-mail: zhengtx@cqupt.edu.cn 相关文章 [1] 朱永薪, 李永福, 朱浩, 于树友. 通信延时环境下基于观测器的智能网联车辆队列分层协同纵向控制. 自动化学报. doi: 10.16383/j.aas.c210311 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c210311?viewType=HTML [2] 李永福, 邬昌强, 朱浩, 唐晓铭. 考虑车辆跟驰作用和通信时延的网联车辆队列轨迹跟踪控制. 自动化学报, 2021, 47(9): 2264-2275. doi: 10.16383/j.aas.c190046 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190046?viewType=HTML [3] 张宇, 李芦钰, 郭源博, 张晓华. 基于θ-D方法的欠驱动TORA系统非线性最优控制. 自动化学报, 2020, 46(7): 1401-1410. doi: 10.16383/j.aas.c180032 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c180032?viewType=HTML [4] 王琼, 郭戈. 车队速度滚动时域动态规划及非线性控制. 自动化学报, 2019, 45(5): 888-896. doi: 10.16383/j.aas.c170442 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c170442?viewType=HTML [5] 甄子洋. 舰载无人机自主着舰回收制导与控制研究进展. 自动化学报, 2019, 45(4): 669-681. doi: 10.16383/j.aas.2018.c170261 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c170261?viewType=HTML [6] 苏善伟, 朱波, 向锦武, 林岩. 非线性非最小相位系统的控制研究综述. 自动化学报, 2015, 41(1): 9-21. doi: 10.16383/j.aas.2015.c140322 http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2015.c140322?viewType=HTML [7] 王伟, 赵清, 吕晓永, 李欣. 具有输入非线性的MEMS振动陀螺零点校正方法. 自动化学报, 2014, 40(10): 2171-2178. doi: 10.3724/SP.J.1004.2014.02171 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2014.02171?viewType=HTML [8] 诸兵, 霍伟. 主旋翼升力和机身姿态受限的模型直升机非线性控制. 自动化学报, 2014, 40(11): 2654-2664. doi: 10.3724/SP.J.1004.2014.02654 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2014.02654?viewType=HTML [9] 曾莉, 胡广大. 含通信延时及输入延时的线性多智能体的一致性. 自动化学报, 2013, 39(7): 1133-1140. doi: 10.3724/SP.J.1004.2013.01133 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.01133?viewType=HTML [10] 姜钟平, 黄捷. 基于非线性反馈的镇定和输出调节: 简要综述. 自动化学报, 2013, 39(9): 1389-1401. doi: 10.3724/SP.J.1004.2013.01389 http://www.aas.net.cn/cn/article/doi/10.3724/SP.J.1004.2013.01389?viewType=HTML [11] 童长飞, 章辉, 孙优贤. 含仿射不确定参数的多项式非线性系统控制器设计. 自动化学报, 2007, 33(12): 1321-1325. doi: 10.1360/aas-007-1321 http://www.aas.net.cn/cn/article/doi/10.1360/aas-007-1321?viewType=HTML [12] 朱江滨, 易建强. 非线性欠驱动系统的实时控制. 自动化学报, 2004, 30(1): 131-136. http://www.aas.net.cn/cn/article/id/16357?viewType=HTML [13] 刘强, 尔联洁, 刘金琨. 参数不确定机械伺服系统的鲁棒非线性摩擦补偿控制. 自动化学报, 2003, 29(4): 628-632. http://www.aas.net.cn/cn/article/id/13916?viewType=HTML [14] 刘治, 李春文. 基于近似模型的多层模糊CMAC自适应非线性控制. 自动化学报, 2002, 28(5): 773-776. http://www.aas.net.cn/cn/article/id/15569?viewType=HTML [15] 丁刚, 张曾科, 韩曾晋. 非线性系统的鲁棒自适应模糊控制. 自动化学报, 2002, 28(3): 356-362. http://www.aas.net.cn/cn/article/id/15645?viewType=HTML [16] 冯纯伯, 张侃健, 费树岷. 基于无源性分析的鲁棒控制系统设计. 自动化学报, 1999, 25(5): 577-582. http://www.aas.net.cn/cn/article/id/16681?viewType=HTML [17] 谭群华, 李伟, 王永强, 孙增圻. 一种控制机械手的自调节模糊逻辑控制器. 自动化学报, 1997, 23(1): 85-89. http://www.aas.net.cn/cn/article/id/17086?viewType=HTML [18] 韩京清. 非线性PID控制器. 自动化学报, 1994, 20(4): 487-490. http://www.aas.net.cn/cn/article/id/14059?viewType=HTML [19] 倪先锋, 陈宗基, 周绥平. 基于神经网络的非线性学习控制研究. 自动化学报, 1993, 19(3): 307-315. http://www.aas.net.cn/cn/article/id/14238?viewType=HTML [20] 褚健, 于杰, 王骥程. 基于状态变换的非线性鲁棒控制器设计. 自动化学报, 1992, 18(5): 590-594. http://www.aas.net.cn/cn/article/id/14366?viewType=HTML 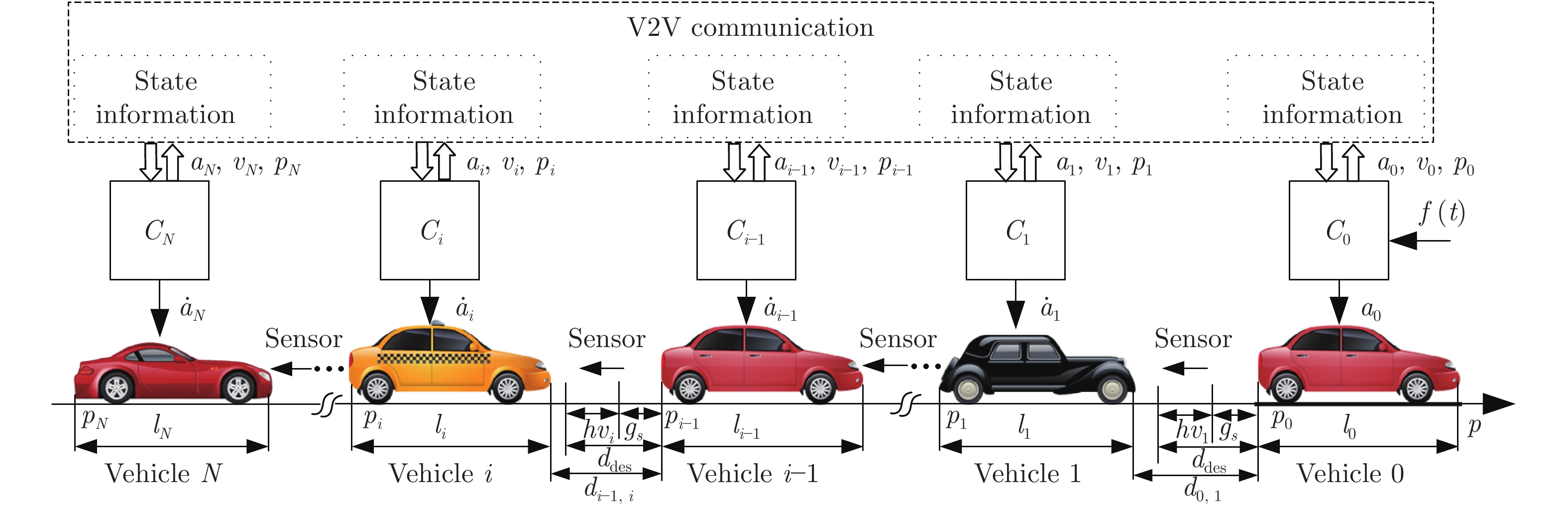
https://blog.sciencenet.cn/blog-3291369-1339445.html
上一篇:图像异常检测研究现状综述
下一篇:基于多阶运动参量的四旋翼无人机识别方法