博文
考虑车辆横向主动安全的智能驾驶员模型
|
引用本文
隋振, 梁硕, 田彦涛. 考虑车辆横向主动安全的智能驾驶员模型. 自动化学报, 2021, 47(8): 1899−1911 doi: 10.16383/j.aas.c190526
Sui Zhen, Liang Shuo, Tian Yan-Tao. Intelligent driving model considering lateral active safety of vehicles. Acta Automatica Sinica, 2021, 47(8): 1899−1911 doi: 10.16383/j.aas.c190526
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190526
关键词
智能驾驶,主动换道,转向控制,模型预测控制,轨迹规划
摘要
结合智能车面临的横向安全问题, 设计了一种具有横向安全性的智能驾驶员模型. 该系统由转向控制、速度控制和决策规划三个模块组成. 该系统的主要作用包括: 一是通过在转向控制中加入主要约束提高车辆在转向过程中的横向稳定性, 减小车辆发生侧滑、侧倾、侧偏等风险; 二是在换道场景下, 决策规划单元合理分析交通环境中的车间距并计算出驶入临近车道的速度和轨迹, 使智能车实现安全换道. CarSim/Simulink仿真结果表明, 该智能驾驶员系统提高了车辆行驶的横向安全性.
文章导读
驾驶员模型本质上即智能车辆的自动驾驶控制器, 自动完成车辆在特定驾驶任务下的速度控制与转向. 通常根据车辆运动的维度, 驾驶员模型可以大致分为纵向驾驶员模型、横向驾驶员模型与复合驾驶员模型[1]. 现如今最优控制理论、自适应控制理论与模型预测控制(Model predictive control, MPC)理论已成为当前驾驶员建模的主流方法. 如Yoshida等[2]采取自适应控制理论建立驾驶员模型. Qu等[3-4]提出了基于随机模型预测控制的驾驶员建模方法. Falcone等[5]则利用线性时变模型预测控制算法建立了自动驾驶车辆的转向控制器, 也可认为是横向驾驶员模型. Du等[6]利用非线性模型预测控制(Nonlinear model predictive control, NMPC)实现车辆速度和转向的综合控制. 未来随着人工智能技术的推进, 基于机器学习技术在特定驾驶任务条件下建立驾驶员模型也逐渐引起了人们的重视. 如Amsalu等[7]利用支持向量机对驾驶员在十字路口处的驾驶行为进行了分析与建模, 对驾驶员在十字路口的行为进行准确的预测, 并用于指导实际驾驶行为.
在智能驾驶员模型飞速发展的同时, 车辆的主动安全也逐渐引起了人们的重视[8]. 车辆的横向运动过程中主要面对的安全威胁包括: 1)在车辆转向过程中, 由于车辆系统的非线性和耦合性使其在高速、弯道或者在湿滑路面下极容易发生侧滑、侧翻、车道偏离等危险. 2)在复杂交通环境中, 因对交通场景中环境态势分析的不足, 导致和其他交通车辆发生碰撞事故.
本文研究的智能驾驶员模型主要解决两方面问题: 1)针对高速、低路面附着系数以及转弯工况下, 通过设计模型预测控制器作为车辆转向控制器并考虑车辆的侧向加速度、横摆角速度、质心侧偏角和横向转移率等现实约束, 实现智能车辆在跟踪轨迹的同时提高侧向稳定. 这里所指的侧向稳定性即车辆在行驶过程中, 不发生侧滑或侧翻的极限性能, 提高侧向稳定性即减小车辆发生侧滑、侧翻的风险. 2)在直线多车道的道路条件下, 通过分析一般工况下车辆换道行驶条件, 采用线性模型预测理论设计速度调整控制算法, 采用粒子群算法结合贝塞尔曲线设计轨迹发生器, 辅助智能车安全的实现自动换道的驾驶任务, 即在换道过程中不与环境车辆发生任意形式的碰撞.

图 1 驾驶员模型结构
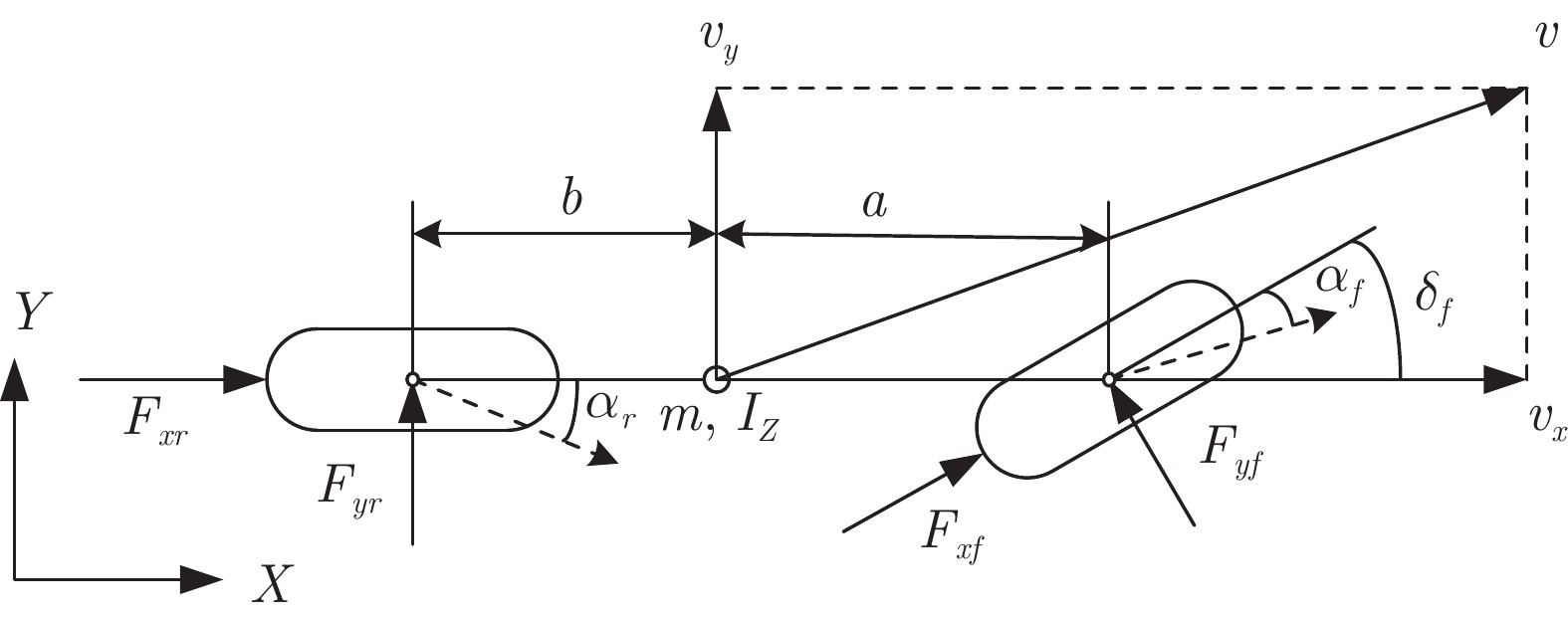
图 2 简化3自由度车辆动力学模型

图 3 车辆侧倾动力学模型
本文将结合智能车在道路行驶中可能出现的安全问题, 设计了一种具有横向安全性的新型驾驶员模型. 该驾驶员模型从结构上由速度控制器、转向控制器和感知决策模块组成. 主要实现车辆准确跟踪轨迹并提高稳定性, 减小侧向安全风险, 实现自主安全换道.
首先, 转向控制器采用预测模型结合车辆质心侧偏角、横摆角速度、侧向加速度和横向转移率的约束条件相结合, 通过对性能指标与约束条件的二次规划求解, 得出车辆模型的最优控制率. 最终在高速、低路面附着系数以及转弯路况下, 转向控制器具有良好的轨迹跟踪性能和侧向稳定性.
其次, 为了避免在换道过程中与目标车道上的车辆发生碰撞, 通过对目标车道安全间距的分析, 确定出智能车执行换道的主要条件与驶入对象车道的参考加速度范围, 采用线性模型预测控制理论设计速度调整控制算法进行车速的控制. 为避免和原车道前车的发生碰撞, 采用粒子群算法计算最优的换道路径. 在三种换道工况下, 智能车均实现了通用场景下的主动换道行为, 并与环境车辆保持一定的安全间距. 不同驾驶员参数的设置, 也体现出了驾驶员模型在同一工况下的差异.
最后, 本文还存在以下改进工作:
1) 实验中设置不同驾驶员模型参数所引起的驾驶行为差异, 体现出实际行驶过程中不同驾驶员在同一路况往往体现出不一样的驾驶风格. 针对驾驶风格的定义及其判定依据和主要参数指标目前依然缺乏客观统一的依据, 后期仍需通过对真实驾驶数据的分析进行探索.
2) 实际路况复杂多样, 论文研究难以对所有复杂路况进行一一验证. 目前本文所做工作也只能在一般条件下的换道过程进行检验. 如何使智能车适应更加极端的工况以及如何建立通用的换道检验标准也将成为本文接下来要进行的工作.
作者简介
隋振
吉林大学通信工程学院副教授, 博士. 主要研究方向为复杂系统建模优化与控制. 本文通信作者. E-mail: suizhen@jlu.edu.cn
梁硕
2019年获得吉林大学通信工程学院硕士学位. 主要研究方向为电动汽车主动安全系统与智能辅助驾驶. E-mail: liangshuo0501@163.com
田彦涛
吉林大学通信工程学院教授. 1993年吉林工业大学获得博士学位. 主要研究方向为复杂系统建模, 优化与控制, 电动汽车主动安全系统与智能辅助驾驶. E-mail: tianyt@jlu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1349378.html
上一篇:绳长时变情况下轮胎式集装箱起重机非线性防摆控制算法
下一篇:基于多模态特征子集选择性集成建模的磨机负荷参数预测方法