博文
一种改进的皮层网络环境认知模型
|
引用本文
武悦, 阮晓钢, 黄静, 柴洁. 一种改进的皮层网络环境认知模型. 自动化学报, 2021, 47(6): 1401−1411 doi: 10.16383/j.aas.c190715
Wu Yue, Ruan Xiao-Gang, Huang Jing, Chai Jie. An improved cortical network model for environment cognition. Acta Automatica Sinica, 2021, 47(6): 1401−1411 doi: 10.16383/j.aas.c190715
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190715
关键词
皮层网络,波前传播,神经元噪声,环境认知,类脑计算
摘要
前额皮层是哺乳动物环境认知能力的重要神经生理基础, 许多研究基于皮层网络结构对前额皮层进行计算建模, 使机器人能够完成环境认知与导航任务. 但是, 对皮层网络模型神经元噪声(一种干扰神经元规律放电的内部电信号)鲁棒性方面的研究不多, 传统模型采用的奖励扩散方法存在着导航性能随噪声增大而下降过快的问题, 同时其路径规划方法效果不好, 无法规划出全局最短路径. 针对上述问题, 本文在皮层网络的基础上引入波前传播算法, 结合全局抑制神经元来设计奖励传播回路, 同时将时间细胞和位置偏好细胞引入模型的路径规划回路以改善路径规划效果. 为了验证模型的有效性, 本文复现了心理学上两个经典的环境认知实验. 实验结果表明, 本模型与其他皮层网络模型相比表现出更强的神经元噪声鲁棒性. 同时, 模型保持了较好的路径规划效果, 与传统路径规划算法相比具有较高的效率.
文章导读
环境认知是哺乳动物觅食和生存的基本技能, 研究表明[1-3], 哺乳动物普遍具有强大的环境认知能力. 研究并复现哺乳动物的环境认知机制对于提高智能体导航能力、增进人们对生物环境认知机制的理解有着重要意义. 有研究发现[4], 前额皮层与高层次的环境认知有关, 对前额皮层实施组织切除术后的大鼠不能完成Morris水魔方环境认知任务. 皮层网络实质上是不同神经元在大脑中的组织方式, 其组成单元皮质柱是一种按照神经元功能排列的分层结构. 皮层网络对于哺乳动物环境认知的重要作用在于建立感官输入与动作决策之间的联系, 形成完整的环境认知能力.
为了使机器人表现出像哺乳动物那样强大的环境认知能力, 很多学者对前额皮层网络进行了计算建模研究. 皮层网络建模通常涉及奖励传播及路径规划两个问题. 对于前者, 目前广泛采用奖励扩散[5-9](Reward diffusion)的方法. 该方法以固定的传播系数将奖励值传播给周围神经元, 具有计算简单的优点. 但是, 由于离子通道的随机开闭或神经元的形态变化, 神经元内部存在着噪声信号, 干扰了神经元的规律放电[10]. 在考虑神经元噪声的情况下, 基于奖励扩散方法的模型由于噪声在神经元传递过程中的累积效应, 导航表现有所下降, 且奖励信息随距离增加而发生衰减. 对于路径规划问题, 皮层网络模型的路径规划主要采用向量法[11]和位置细胞法[12-13]. 向量法通过对头朝向细胞的活动加权平均作为动作方向, 位置细胞法以位置细胞中心为规划路径点. 虽然这两种方法都能完成绕近路任务(例如托尔曼三通道迷宫[14]), 但是规划出的路径均依赖于已探索区域, 无法规划出全局上最短的路径. 一些学者试图将两种方法结合起来以规避缺点[15-19], 但其模型普遍存在易受神经元噪声影响的问题.
为了提高模型对于神经元噪声的鲁棒性, 本文将波前传播(Wavefront propagation)方法引入模型. 波前传播方法[20-22]利用整合放电(Integrate-and-fire, IF)神经元避免奖励信息的衰减, 由此增强模型抗神经元噪声的能力. 其现象已在电生理学实验中被观测证实, 是一种具有生物合理性(Bio-plausibility)的计算方法[23]. 目前, 已有学者将其应用于基于图的导航中[24-26], 但关于该方法在皮层网络模型中的应用还鲜有报道. 受此启发, 本文将波前传播应用于模型的奖励传播回路, 结合全局抑制神经元, 提出一种改进的皮层网络模型以提高对神经元噪声的抗干扰性. 另一方面, 为了保证模型的路径规划效率, 模型引入了位置细胞和时间细胞, 利用时间细胞活动随时间增长的特性及其时间常数衰减机制选出全局最佳路径点, 进而提高路径规划性能.
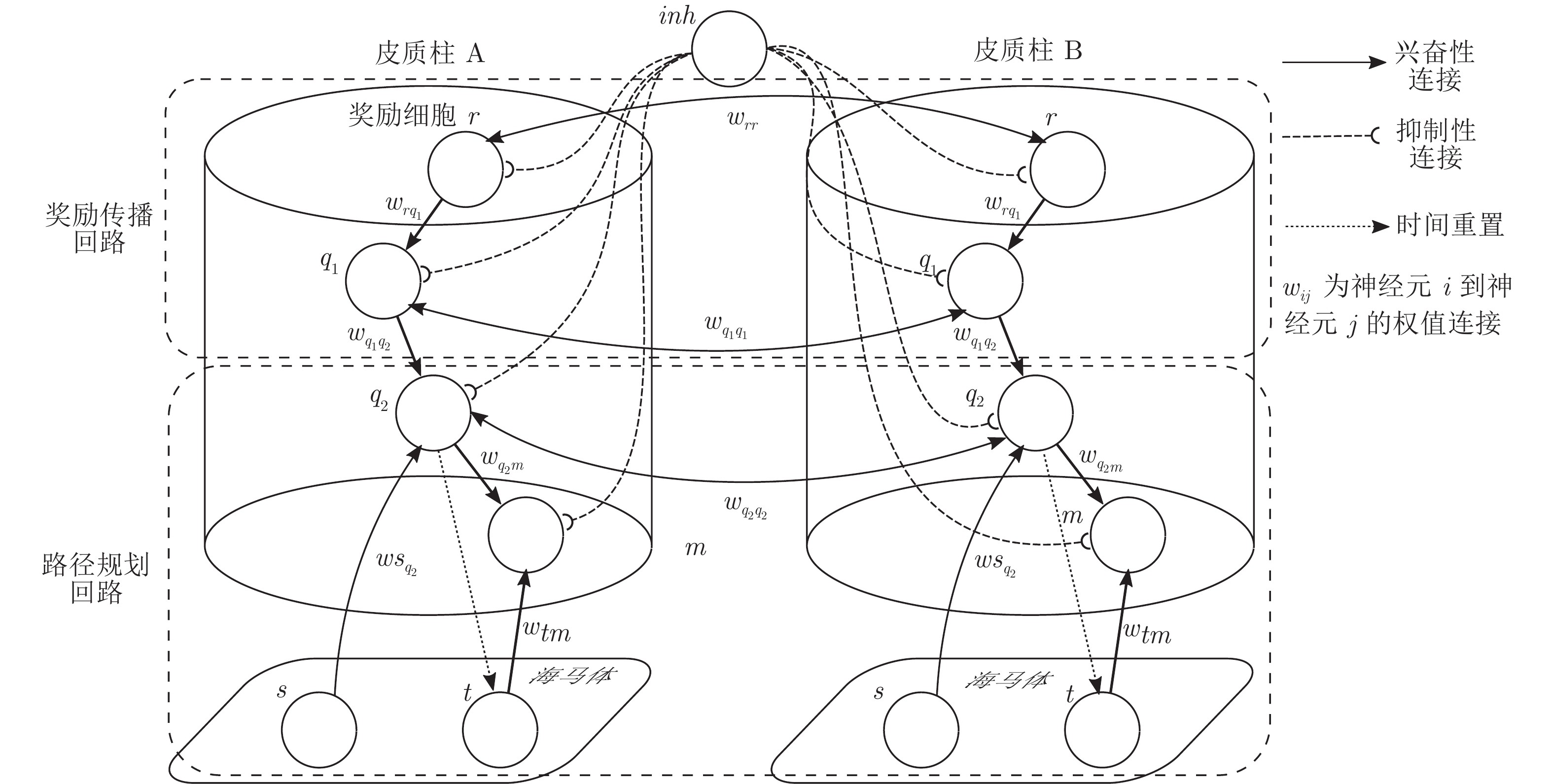
图 1 皮层网络模型结构示意图

图 2 托尔曼14单元T型迷宫实验示意图
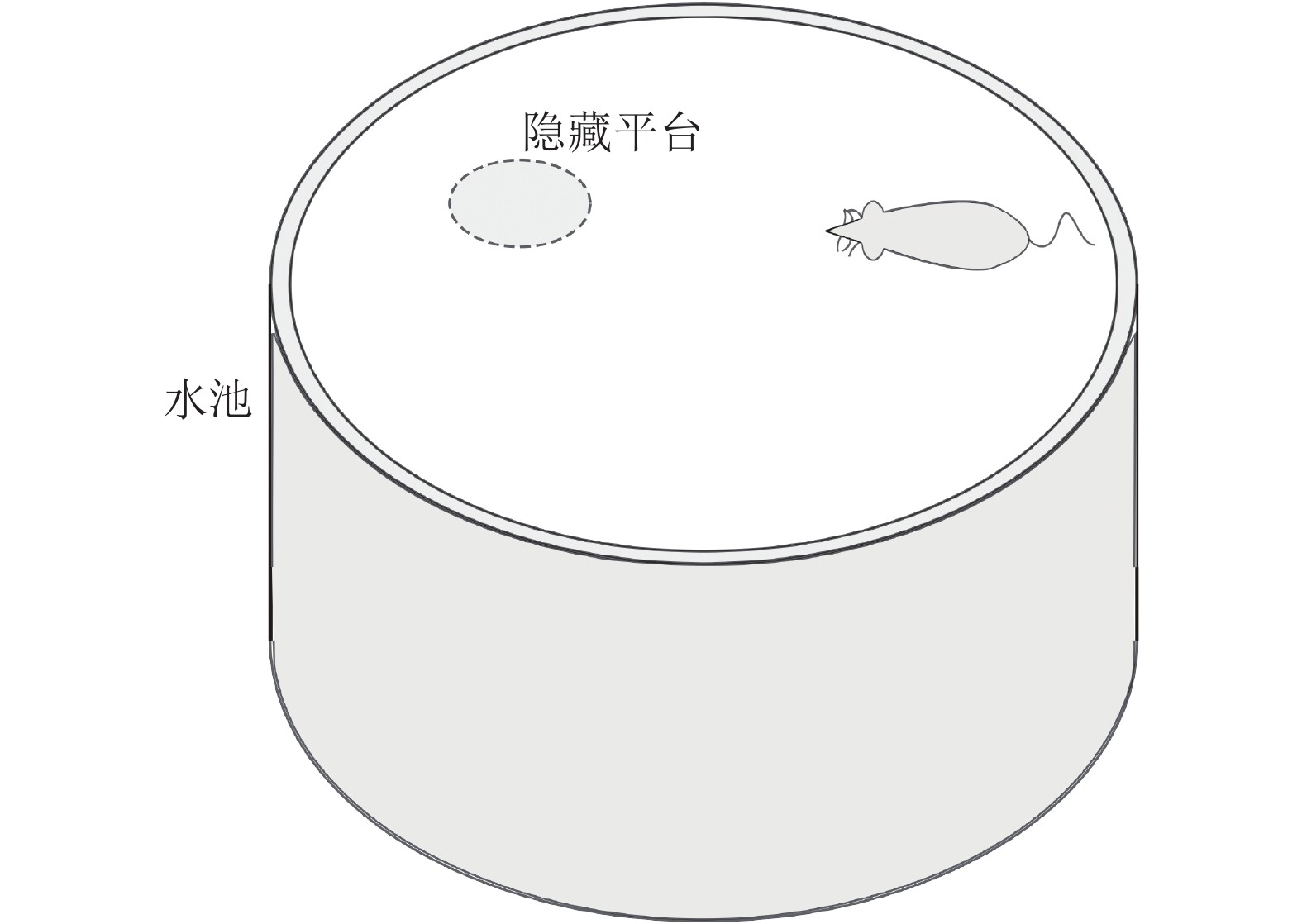
图 6 Morris水迷宫示意图
哺乳动物的皮层网络整合感官信息并输出动作决策, 该信息处理中枢对环境认知的重要性引起了许多对皮层网络的计算建模研究. 针对目前的皮层网络模型受神经元噪声影响较大的问题, 本文利用整合放电模型的非线性特性对神经元进行建模, 将波前传播方法引入奖励传播回路, 同时结合全局抑制神经元, 使模型具有更强的抗噪声干扰性. 同时, 为了防止路径规划效率的下降, 在路径规划回路中引入位置偏好细胞和来自海马体的时间细胞, 通过时间细胞及其时间常数衰减机制选出全局最佳路径点. 模型结构、各神经元功能设计及波前传播方法都基于目前的神经生理学研究结论, 具有一定的生物合理性.
为了验证模型的有效性, 本文复现了心理学上两个经典的环境认知实验: 托尔曼14单元T型迷宫实验和Morris水迷宫实验, 并与其他皮层网络模型和路径规划方法进行了对比. 实验数据表明, 本文所提出的模型与其他皮层网络模型相比具有更强的神经元噪声鲁棒性, 较之A* 算法和滚动窗口RRT算法具有更好的路径规划效果. 同时, 模型也表现出较强的对动态环境的自适应能力.
另一方面, 目前模型中时间细胞的时间常数衰减机制较为简单, 需要进一步优化以提高最佳路径点的选取能力及搜寻速度. 为了使模型具有更佳的环境适应能力, 时间常数随环境的变化机制需要进一步探讨. 如何构建时间常数衰减机制涉及的回路, 使其符合生理学研究发现, 也是下一步研究的重点.
作者简介
武悦
北京工业大学信息学部硕士研究生. 2017年获得西南交通大学学士学位. 主要研究方向为环境认知建模与类脑计算.E-mail: wuy50271@gmail.com
阮晓钢
北京工业大学信息学部教授. 1992年获得浙江大学博士学位. 主要研究方向为自动控制, 人工智能与智能机器人.E-mail: adrxg@bjut.edu.cn
黄静
北京工业大学信息学部副教授. 2016年获得北京工业大学控制科学与工程博士学位. 主要研究方向为认知机器人与机器学习. 本文通信作者.E-mail: huangjing@bjut.edu.cn
柴洁
北京工业大学信息学部博士研究生. 主要研究方向为认知学习和认知导肮.E-mail: chaijie@emails.bjut.edu.cn
https://blog.sciencenet.cn/blog-3291369-1352621.html
上一篇:非匹配扰动下的多智能体系统固定时间一致跟踪
下一篇:基于局部熵的SLAM视觉里程计优化算法