博文
基于表面肌电的意图识别方法在非理想条件下的研究进展
|
引用本文
李自由, 赵新刚, 张弼, 丁其川, 张道辉, 韩建达. 基于表面肌电的意图识别方法在非理想条件下的研究进展. 自动化学报, 2021, 47(5): 955−969 doi: 10.16383/j.aas.c200263
Li Zi-You, Zhao Xin-Gang, Zhang Bi, Ding Qi-Chuan, Zhang Dao-Hui, Han Jian-Da. Review of sEMG-based motion intent recognition methods in non-ideal conditions. Acta Automatica Sinica, 2021, 47(5): 955−969 doi: 10.16383/j.aas.c200263
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c200263
关键词
肌电信号识别,研究进展,非理想条件,模式识别
摘要
在基于表面肌电信号(Surface electromyography, sEMG)的意图识别研究领域, 目前大多数的研究主要集中在提高肌电识别的准确性方面. 然而, 在实际应用中, 基于sEMG识别的交互系统往往受到诸多非理想因素干扰, 肌电识别的准确性大大降低. 本文主要关注在非理想条件下肌电识别的鲁棒性研究, 首先详细归纳了肌电识别方法受到的非理想干扰因素(如电极偏移、个体性差异、肌肉疲劳、肢体姿态或其他综合性干扰), 总结了当前研究的抗干扰方法; 随后讨论了非理想干扰因素研究现状中的主要问题; 最后在构建肌电数据集、探索深度学习和迁移学习以及肌电分解研究等方面, 对未来的关键技术进行了展望.
文章导读
表面肌电信号(Surface electromyography, sEMG)是由运动关联肌肉的运动单元动作电位(Motor unit action potential, MUAP)沿着肌纤维方向传播, 在人体皮肤表面形成的叠加电信号. 该信号直接反映了引起肢体运动的肌肉收缩状态, 可从中解码出运动直接关联意图, 其中蕴含丰富的肌肉收缩力、关节力矩等信息, 广泛应用于识别数十种肢体状态或预测关节连续信息[1]; sEMG相对于刺入式肌电信号(Intramuscular EMG, iEMG)而言, 采集方式简单, 易于构建集成系统和开发可穿戴设备.
因此, sEMG广泛应用于助力机器人、康复机器人与智能假肢等系统中, 在人机协作型机器人中也逐渐成为研究热点[2-3]. 与传统的程式控制机器人交互方式相比, 基于sEMG的人机交互方式赋予了机器人智能性与认知能力, 具有主动感知人行为意图的能力, 有利于实现人机的自然、直觉与准确交互. 尤其对残疾人而言, 肌电假肢自然直觉的控制方式, 能够极大地提高他们的生活质量.
为了满足不同场景下的人机交互需求, 基于sEMG的人体意图识别方法, 从起初基于幅值的阈值判别法, 慢慢发展为基于模式识别和机器学习的研究思路, 其主要遵从有监督学习的基本范式, 如图1所示. 其处理流程一般包含: 离线的模型训练和在线的意图识别. 第1阶段如该图的虚线箭头所示, 首先要求用户根据实验场景需求, 获取已知动作标签对应的肌电信号数据, 经数据预处理和特征提取等环节, 肌电信号特征与动作标签共同完成模型的训练. 而在第2阶段的在线意图识别中, 已经训练完成的识别模型对在线的肌电信号进行同样数据预处理和特征提取等环节, 最后对输入的肌电信号输出识别结果.
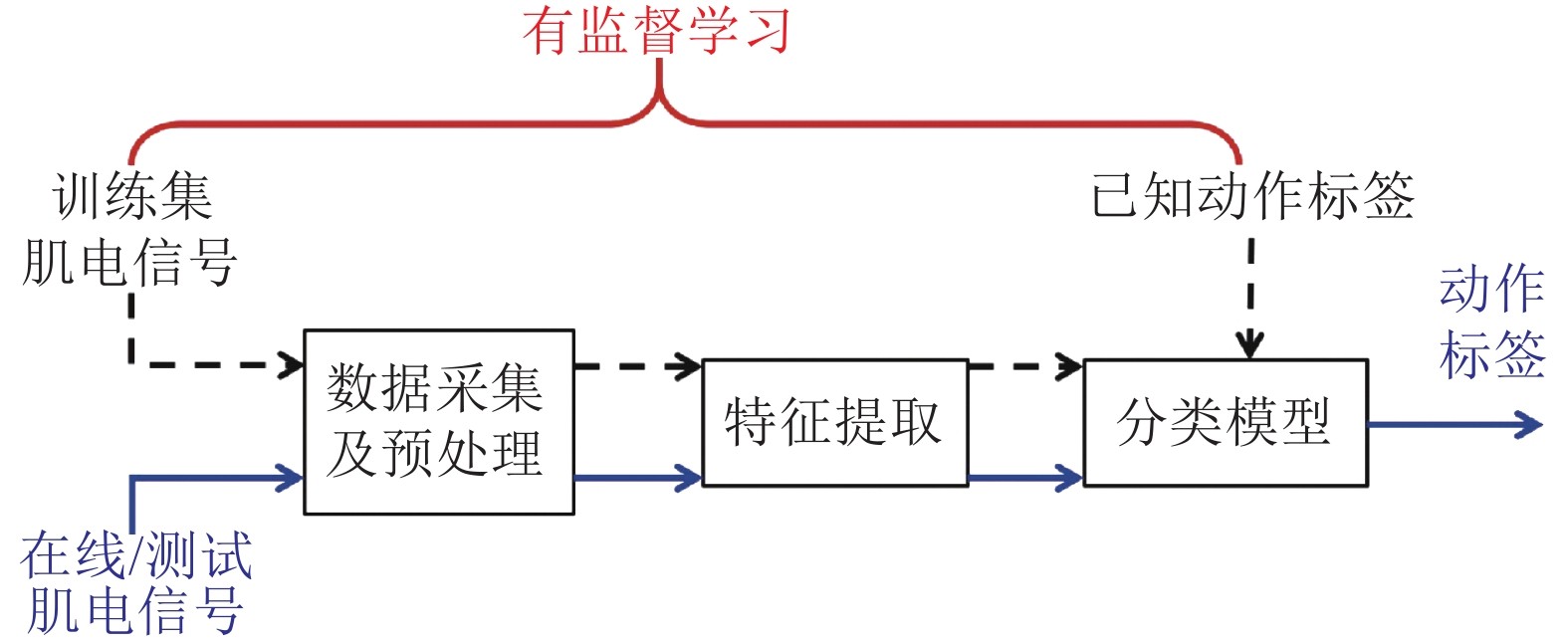
图 1 基于监督学习的sEMG识别模型训练与测试框架
依据识别模型的输出类型可分为两类问题: 离散动作分类和连续运动估计. 在离散动作分类识别方面, 由起初的张手和闭合的二分类问题, 逐渐发展成对几十种手部/腕部动作识别[4-5]; 针对其中10种左右的常见手势识别, 其基本识别精度高达90%. 在连续运动估计方面, 对人体上/下肢多关节的角度估计误差约为5° 或更低[6-7].
采用阈值判别法或模式识别方法的一个基本假设, 即训练集与测试集符合相同的分布. 然而在实际日常生活的肌电交互过程中, 往往会存在多种差异或干扰, 造成肌电信号的训练集与测试集的分布明显不同, 最终导致肌电识别准确性低、交互效果差[8]. 目前大部分比较好的识别结果往往来自于无干扰情况或实验室理想环境, 未充分考虑肌电交互系统在日常使用中的潜在差异或干扰. 相对于实验室的理想环境, 本文将肌电系统在实际中可能涉及到的差异或干扰统称为“非理想因素”, 存在“非理想因素”的日常环境即为“非理想条件”. 这些非理想因素包括: 电极偏移、个体性差异、肌肉疲劳、姿态干扰、其他干扰或多种因素的综合干扰.
前期已有学者总结了sEMG的一般处理方法或应用场景, 多侧重在理想场景或无干扰的情况下如何识别更多类别, 通过对比分析不同特征处理、降维方法和识别模型等环节, 以提高肌电识别的精度和准确性[1]; 对目前大量克服单个干扰的研究, 鲜有文献总结肌电系统鲁棒性方面的研究现状和进展, 更缺乏对实际应用中存在的诸多干扰因素给出应对方案的归纳和建设性的技术展望.
因此, 本文首先综述了在各种非理想条件中非理想因素干扰的影响程度或性质, 并总结归纳了目前研究针对各个干扰的消除与克服方法; 然后整体性讨论了各个非理想因素之间的耦合性和过渡性, 以及目前研究中存在的主要问题; 最后本文从构建统一的数据集测试平台等作为切入点, 对未来该领域的研究内容提出了一些展望, 为进一步推广肌电交互系统提供切实可行的技术方案.
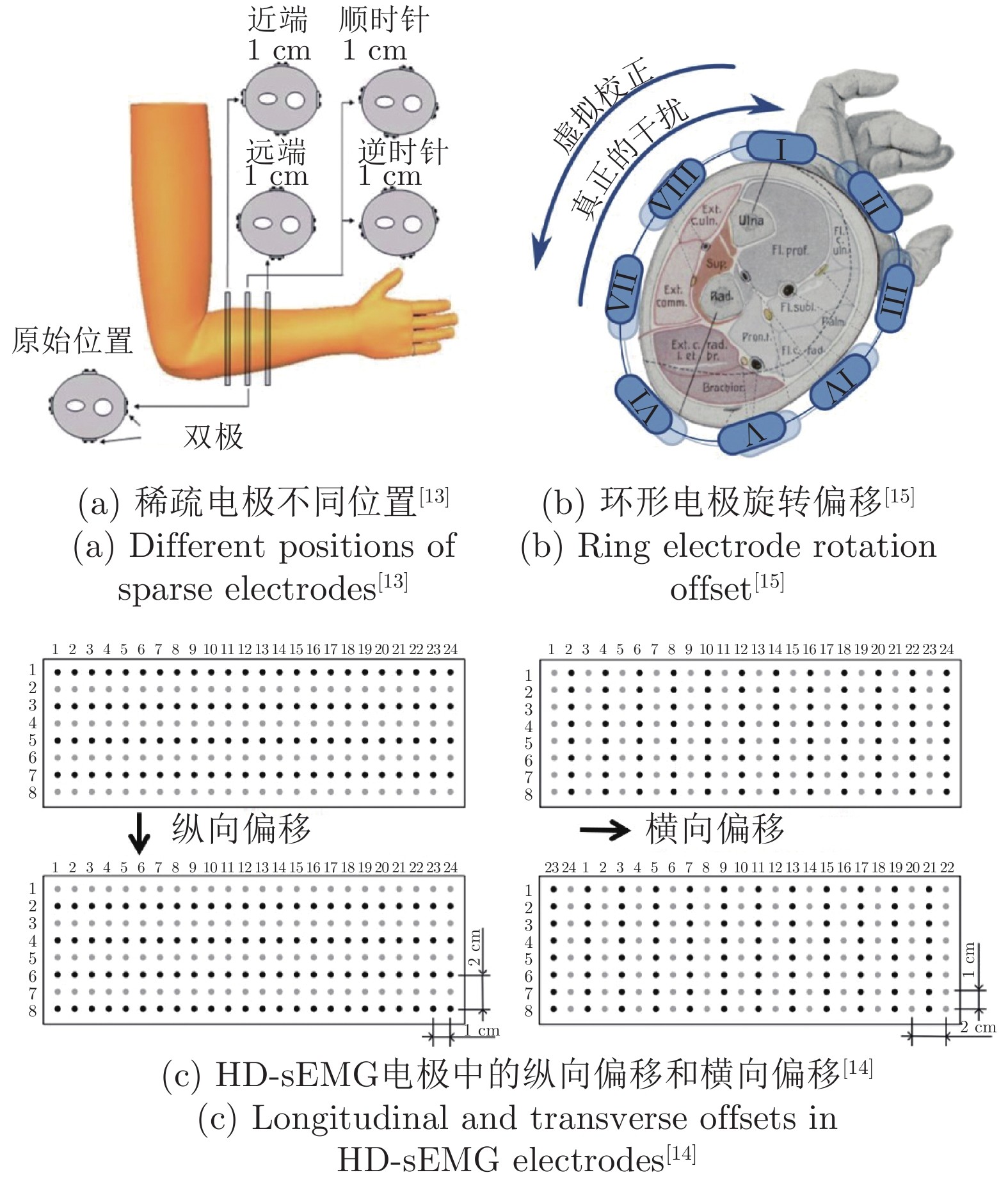
图 2 不同电极的偏移形式
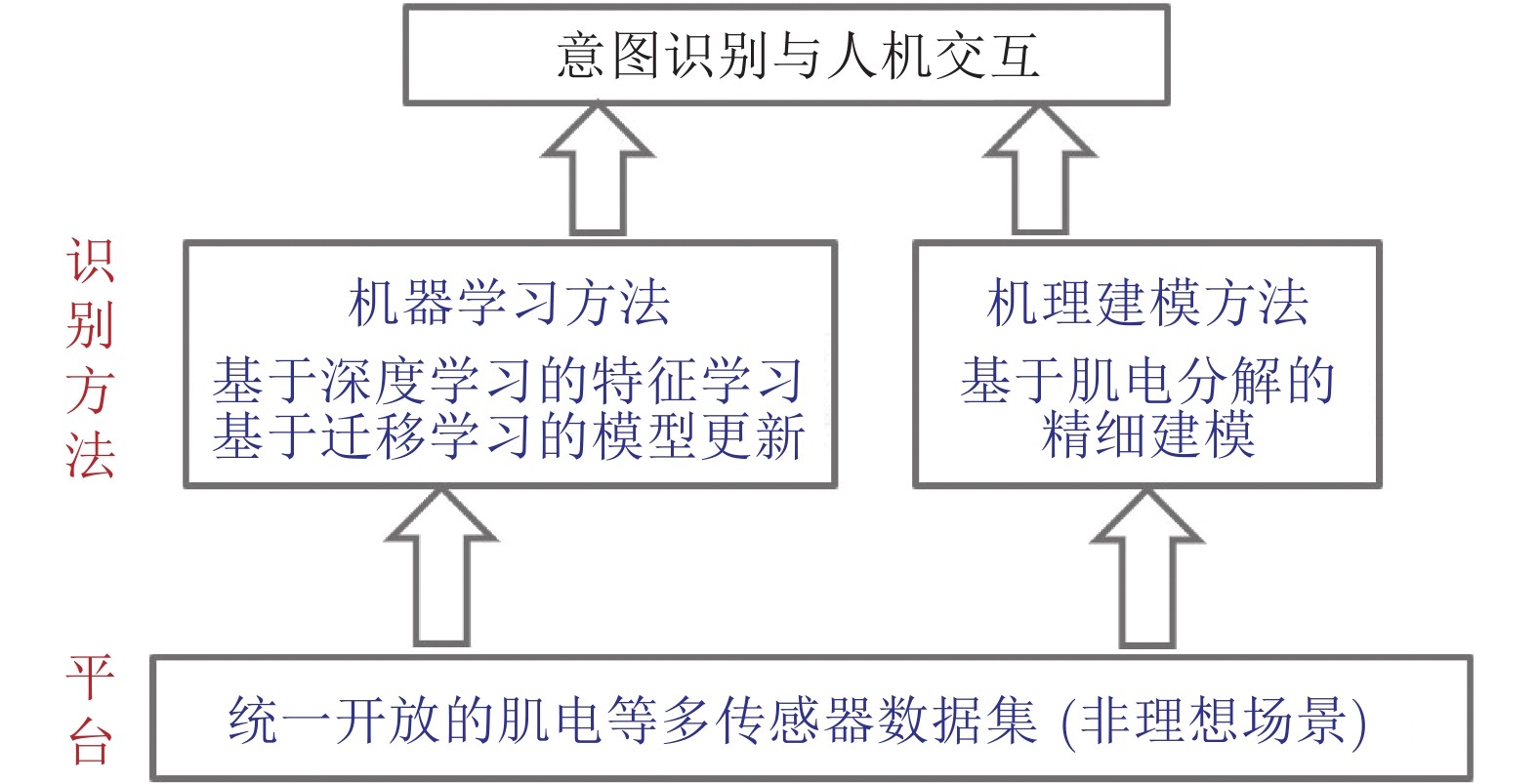
图 6 非理想肌电的关键技术展望
随着智能假肢、可穿戴外骨骼与助力设备等康复机器人系统在本体机械结构设计与控制系统方面的不断完善, 以及高精度肌电信号硬件采集系统的性能提升, 如何实现人—机的准确、自然与稳定交互, 越来越成为人机共融系统中的瓶颈环节, 也已经逐渐成为研究热点问题. 目前, 大量基于机器学习和模式识别的肌电意图解码方法不断推陈出新, 将意图识别的准确率或精度不断提升.
然而当基于肌电信号的诸多康复机器人系统从实验室环境推广到实际日常使用时, 却面临着大量的非理想因素干扰. 本文主要聚焦在电极偏移、个体性差异、肌肉疲劳、肢体姿态和其他综合性干扰方面, 详细归纳了当前研究的干扰及其应对方法; 接着总结并讨论了研究现状中的关键问题; 最后, 提出了“一个平台+两个方法”的未来关键技术展望, 包括构建统一开放的多传感器融合数据集、探索深度学习的特征学习和基于迁移学习的模型更新与适应, 以及肌电分解研究等技术内容, 旨在为后续深入研究提供潜在的研究思路.
作者简介
李自由
中国科学院沈阳自动化研究所博士研究生. 主要研究方向为生物电信号处理, 模式识别与机器学习. 本文通信作者. E-mail: liziyou@sia.cn
赵新刚
中国科学院沈阳自动化研究所研究员. 主要研究方向为机器人控制, 智能系统与康复机器人. E-mail: zhaoxingang@sia.cn
张弼
中国科学院沈阳自动化研究所副研究员. 主要研究方向为先进控制理论及应用, 智能机器人交互. E-mail: zhangbi@sia.cn
丁其川
东北大学机器人科学与工程学院副教授. 主要研究方向为人体运动意图识别和智能机器人. E-mail: dingqichuan@mail.neu.edu.cn
张道辉
中国科学院沈阳自动化研究所副研究员. 主要研究方向为机器人控制技术. E-mail: zhangdaohui@sia.cn
韩建达
南开大学人工智能学院教授. 主要研究方向为智能系统, 移动机器人自主控制. E-mail: hanjianda@nankai.edu.cn
https://blog.sciencenet.cn/blog-3291369-1352732.html
上一篇:JAS多名青年编委获得2022年度国家杰青、优青
下一篇:深度学习方法在糖尿病视网膜病变诊断中的应用