博文
基于海马体位置细胞的认知地图构建与导航
|
引用本文
阮晓钢, 柴洁, 武悦, 张晓平, 黄静. 基于海马体位置细胞的认知地图构建与导航. 自动化学报, 2021, 47(3): 666−677 doi: 10.16383/j.aas.c190288
Ruan Xiao-Gang, Chai Jie, Wu Yue, Zhang Xiao-Ping, Huang Jing. Cognitive map construction and navigation based on hippocampal place cells. Acta Automatica Sinica, 2021, 47(3): 666−677 doi: 10.16383/j.aas.c190288
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190288
关键词
移动机器人,环境认知,海马体位置细胞,导航,Tolman老鼠绕道实验
摘要
针对移动机器人环境认知问题, 受老鼠海马体位置细胞在特定位置放电的启发, 构建动态增减位置细胞认知地图模型(Dynamic growing and pruning place cells-based cognitive map model, DGP-PCCMM), 使机器人在与环境交互的过程中自组织构建认知地图, 进行环境认知. 初始时刻, 认知地图由初始点处激活的位置细胞构成; 随着与环境的交互, 逐渐得到不同位置点处激活的位置细胞, 并建立其之间的连接关系, 实现认知地图的动态增长; 如果机器人在已访问区域发现新的障碍物, 利用动态缩减机制对认知地图进行更新. 此外, 提出一种位置细胞序列规划算法, 该算法以所构建的认知地图作为输入, 进行位置细胞序列规划, 实现机器人导航. 为验证模型的正确性和有效性, 对Tolman的经典老鼠绕道实验进行再现. 实验结果表明, 本文模型能使机器人在与环境交互的过程中动态构建并更新认知地图, 能初步完成对Tolman老鼠绕道实验的再现. 此外, 进行了与四叉树栅格地图、动态窗口法的对比实验和与其他认知地图模型的讨论分析. 结果表明了本文方法在所构建地图的简洁性、完整性和对动态障碍适应性方面的优势.
文章导读
环境认知和导航是智能移动机器人必备的技能[1-2]. 人和动物可以在复杂环境中进行环境认知和导航, 如觅食、归巢等[3], 而目前移动机器人的认知和导航能力不足以达到动物的水平, 因此, 模拟动物的神经结构和认知机制, 使机器人更加智能地进行环境认知和导航得到了越来越多的关注[4-7]. 一方面, 用数学模型或人工智能算法辅助传统神经科学研究来验证大脑运作的多种假设理论, 可以促进我们对动物环境认知心理和导航行为的理解; 另一方面, 动物的环境认知和导航机制为开发机器人的类脑空间认知模型提供了一个很好的视角, 可以帮助我们设计和构造像动物一样进行自主环境认知的智能移动机器人[8-10].
啮齿类动物出色的导航能力, 其原因长期以来假设为是内部神经空间的类地图的表达, 也就是环境认知地图. 美国行为心理学家Tolman[11]发现老鼠能在没有强化因素的情况下自由探索并学会迷宫的布局, 初次提出认知地图(Cognitive map) 的概念, 认为老鼠能利用对空间环境的内在表达进行环境的认知与记忆. 之后, O'keefe等[12]发现, 当老鼠处于某一特定位置时, 大脑海马体中有若干个神经细胞会一直处于活跃状态; 而当其从这一位置离开, 其他神经细胞则会变得活跃, 这些细胞称为位置细胞(Place cells). 位置细胞实时编码老鼠在环境中的位置信息, 从而在老鼠大脑内部产生一个对其所在空间环境的拓扑表达, 提供了以非自我为中心的认知地图(Allocentric cognitive map)[13]. 研究表明, 在海马CA3区域的位置细胞能形成对环境的独立表征[14]. 此外, 海马体能够存储大量的场景, 并在相同场景出现的时候进行场景复现, 从而指导人或动物的导航行为.
从老鼠环境认知的机制中获得启发, 研究人员通过对老鼠大脑认知机理进行建模, 进一步探究动物的环境认知机理, 并用于指导机器人环境认知与导航[15-16]. Tolman经典迷宫实验, 包括T巷迷宫实验(T-alley maze)、T高架迷宫实验(T-elevated maze)、放射迷宫实验(Radial maze)、老鼠绕道实验(Tolman detour task)等,是对老鼠环境认知行为的探讨. 其中, 绕道实验(Detour task)用于研究不同的认知技能, 如洞察力(Insight)、抑制控制(Inhibitory control)、路径规划(Route planning)等[17], 其特点在于, 更近的目标会产生更强的吸引力, 使动物在遇到障碍物时很难摆脱认为的最短路径而进行绕道. 构建老鼠大脑的数学模型或神经网络模型, 用机器人对老鼠绕道实验进行再现得到了各国研究者们的关注[18]. Schmajuk等[19]提出可以存储空间位置和时间事件连接的递归联结网络(Recurrent associative networks)来构建空间和时间认知地图, 能在Tolman绕道实验中通过选择正确的子目标最终到达目标点, 但其没有给出认知地图的形成过程与形象展示. Martinet等[20]建立了一个可以为空间学习和行动规划提供分布式信息的前额皮质网络模型, 展示了前额皮质柱能够从冗余的海马输入中学习到稀疏的拓扑−度量表示, 再现Tolman绕道实验并说明老鼠的认知洞察能力得益于老鼠大脑神经机制. Gao等[21]提出了一种基于基底神经节的运动学习模型, 从基底神经节中强化学习的动作-评价机制着手再现了Tolman迷宫绕道实验, 但并未涉及认知地图的形成机制.
2011年, Alvernhe等[22]用电生理学方式对Tolman绕道实验中的局部重映射进行研究, 认为位置细胞的局部重映射反映了迷宫局部结构的更新, 使得老鼠在遇到熟悉的道路被阻断或被阻断的道路重新连通等情况时可以选择最优路径. 此外, 自组织图被认为是最接近人脑或生物神经系统的模型, 其表现出了神经细胞群的拓扑特征映射关系, 这与海马体位置细胞放电的机理非常相似. 动态增长的自组织图可以在不需要预先指定其大小的情况下进行拓扑映射, 具有较好的环境映射效果[23-24].
基于此, 本文结合位置细胞和自组织图的特性, 建立动态增减位置细胞认知地图模型 (Dynamic growing and pruning place cells-based cognitive map model, DGP-PCCMM), 该模型使机器人通过与环境的交互激活可达点的位置细胞, 构建并更新位置细胞认知地图; 以构建的认知地图作为输入, 运用位置细胞序列规划算法, 进行机器人实时导航. 本文的认知地图构建方法具有以下优点: 1) 具有类脑仿生特性与一定的生物合理性; 2) 能够适应动态环境(如门的开闭); 3) 能够降低建图的复杂性. 实验结果表明, DGP-PCCMM能动态构建和更新认知地图, 能初步完成对Tolman老鼠绕道实验的再现, 体现了其自组织与自学习特性. 此外, 本文进行了与栅格地图、动态窗口法的对比实验和与其他认知地图模型的讨论分析. 结果表明, 本文方法在所构建地图的简洁性、完整性和对环境中动态障碍适应性方面更有优势.
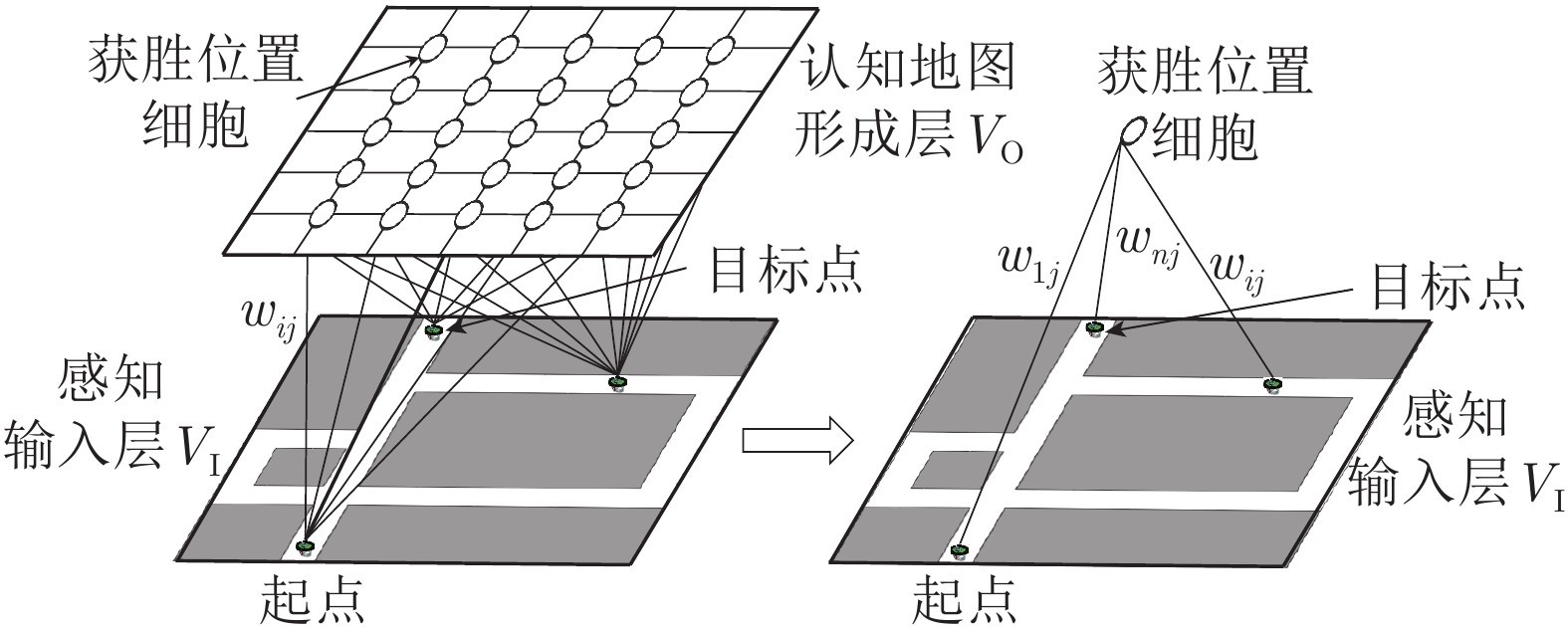
图1 DGP-PCCMM的“感知—响应”框架
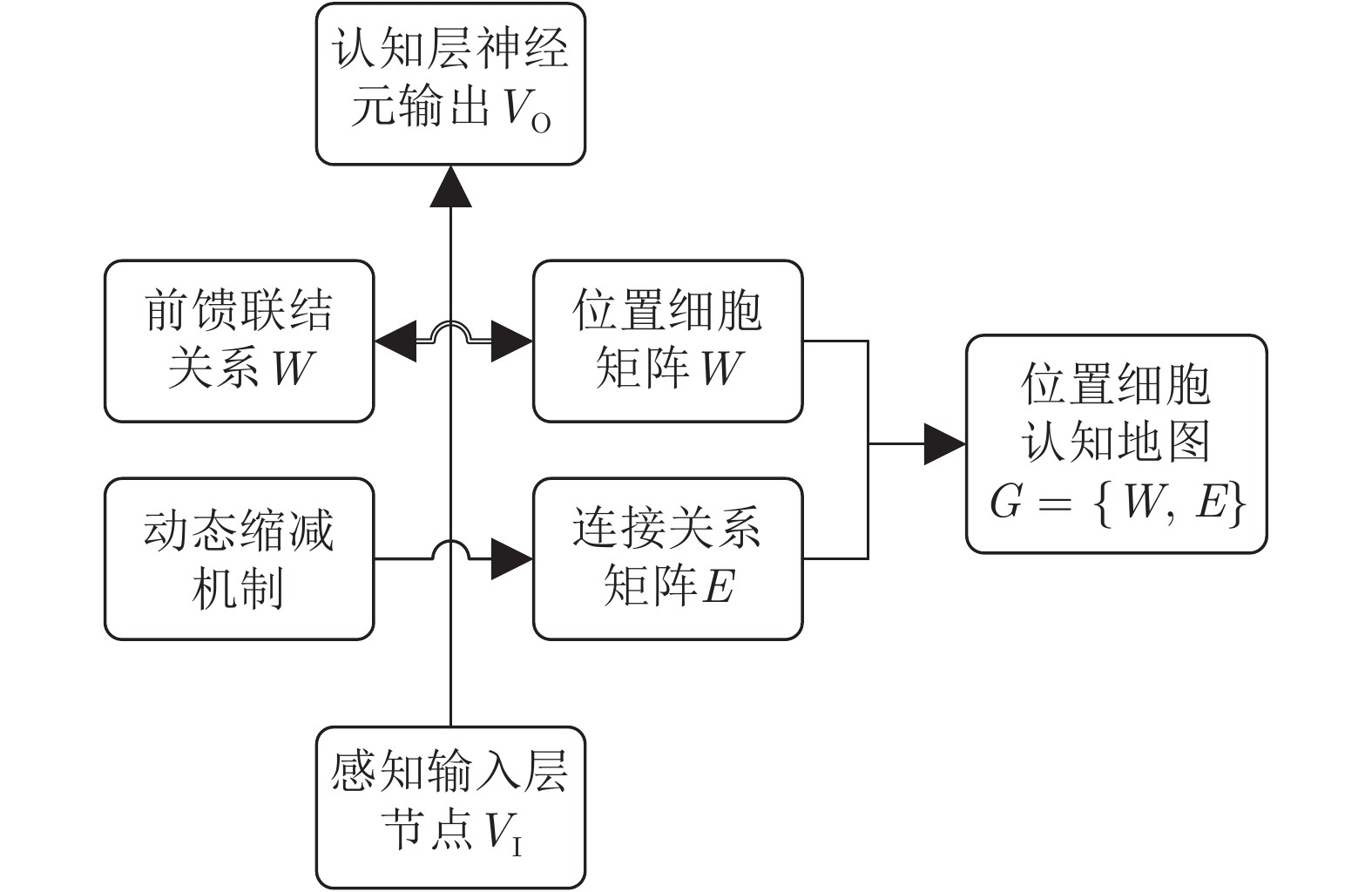
图2 各概念及其之间相互关系

图4 机器人导航框图
本文用机器人再现动物绕道实验, 是通过仿生使机器人更加智能化的一个初步探索. 本文受海马体位置细胞在特定位置放电的启发, 通过构建动态增减的位置细胞认知地图, 再现了Tolman老鼠绕道实验. 目前研究的重点集中在对认知地图的构建上, 所提出的构建方法具有以下优点: 1) 具有类脑仿生特性与一定的生物合理性; 2) 能够适应动态环境(如门的开闭); 3) 能够降低建图的复杂性. 实验结果表明, 机器人漫游和导航的过程中能动态形成和更新认知地图, 能像Tolman老鼠那样, 利用认知地图进行自主环境探索、认知与导航, 完成绕道取食.
本文属于对动物导航过程中大脑运作机制的一个探索, 对海马体位置细胞的建模是后续研究动物导航过程中可能涉及到的内嗅皮层、丘脑、纹状体等之间联合建模的基础. 本文简单表明了海马体位置细胞的场景记忆功能, 对机器人场景记忆的仿生建模有待进一步的研究. 将来期望进一步完善机器人对Tolman绕道实验的再现, 使机器人实现更仿生(如将障碍物撤除后机器人重新发现捷径等)的环境认知.
作者简介
阮晓钢
北京工业大学信息学部教授. 主要研究方向为人工智能与机器人.E-mail: adrxg@bjut.edu.cn
柴洁
北京工业大学信息学部博士研究生. 主要研究方向为认知学习和认知导航.E-mail: chaijie@emails.bjut.edu.cn
武悦
北京工业大学信息学部硕士研究生. 主要研究方向为环境认知建模与类脑计算.E-mail: wuy50271@gmail.com
张晓平
北方工业大学电气与控制工程学院讲师. 主要研究方向为认知机器人.E-mail: zhangxiaoping369@163.com
黄静
北京工业大学信息学部人工智能与自动化学院副教授. 主要研究方向为认知机器人, 机器学习及工业大数据应用. 本文通信作者.E-mail: huangjing@bjut.edu.cn
https://blog.sciencenet.cn/blog-3291369-1357742.html
上一篇:基于相似历史信息迁移学习的进化优化框架
下一篇:基于小波相干性算法的孤独症儿童脑电评估