博文
自动驾驶环境下交叉口车辆路径规划与最优控制模型
|
引用本文
吴伟, 刘洋, 刘威, 吴国弘, 马万经. 自动驾驶环境下交叉口车辆路径规划与最优控制模型. 自动化学报, 2020, 46(9): 1971−1985 doi: 10.16383/j.aas.c190002
Wu Wei, Liu Yang, Liu Wei, Wu Guo-Hong, Ma Wan-Jing. A novel autonomous vehicle trajectory planning and control model for connected-and-autonomous intersections. Acta Automatica Sinica, 2020, 46(9): 1971−1985 doi: 10.16383/j.aas.c190002
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190002
关键词
自动驾驶,交通控制,车辆轨迹,交叉口
摘要
自动驾驶环境下的交叉口基于车车/车路之间的双向信息交互, 能保障自动驾驶车辆相互穿插与协作地通过交叉口, 而无需信号灯控制. 因此, 如何设计高效的面向自动驾驶车辆通行的交叉口管控模型, 已成为研究的热点. 已有研究在建模时, 均基于自动驾驶车辆在交叉口内部的行驶路径已知并作为模型输入, 且大多对交叉口内部的冲突点进行简化. 本文首先将交叉口空间离散化处理, 考虑车辆的实际尺寸并面向非常规交叉口, 使用椭圆曲线建立转弯车辆行驶路径的精确轨迹方程, 再通过外边界投影降维法建立轨迹方程和交叉口空间的映射关系. 建立了基于混合整数线性规划(Mixed integer linear programming, MILP)的自动驾驶交叉口管控模型, 以交叉口总延误最小为控制目标, 同时优化车辆在交叉口的最佳行驶路径和驶入时刻, 使用AMPL (A mathematical programming language)对模型进行编译并使用CPLEX求解器求解. 与经典感应控制和先到先服务模型进行对比, 结果表明, 本文所提出模型能对车辆进入交叉口的时刻和行驶路径进行双重优化, 显著降低自动驾驶车辆通过交叉口的车均延误, 提高交叉口空间的利用效率.
文章导读
随着自动化技术的不断发展, 自动驾驶已成为未来交通发展的趋势[1-3], 根据美国汽车工程师学会(Society of Automotive Engineers, SAE)制定的分级标准, 将车辆的自动驾驶分为6级: 无智能化(L0); 驾驶辅助(L1); 部分自动驾驶(L2); 有条件的自动驾驶(L3); 高度自动驾驶(L4); 全自动驾驶(L5). 在L4级以上自动驾驶环境下, 车辆与车辆、车辆与路边设施之间能实现双向的信息交互, 可以突破已有经典的基于周期、绿信比、相位差的交通流管控方式, 车辆之间能相互协调与合作地通过交叉口, 而无需信号灯控制[4-5]. 在自动驾驶环境下, 交叉口交通控制的对象将直接面向车辆, 每台车辆拥有其唯一的通行方案, 不同行驶方向的车辆可以同时相互穿插地通过交叉口, 这种基于自动驾驶的新型控制的优势在于, 道路的通行能力能得到更充分的利用. 控制的难点在于: 如何使用时间分离和空间分离的方法, 在能够协调不同车辆间交通冲突的条件下, 使到达车辆的总效益最大. 基于上述分析, 如何设计面向自动驾驶车辆的交叉口管控方法(Autonomous intersection control, AIC)已成为近年来的研究热点之一[6-8].
Dresner等[9-10]于2004年和2008年提出了早期的AIC模型, 所有自动驾驶车辆根据到达交叉口的时间次序, 依次请求交叉口的通行权, 如果车辆在交叉口的通过路径上, 与更早到达的车辆冲突, 则需等待, 否则能顺利通行, 通过与信号控制对比, 证明了其模型的有效性. 其模型基于先到先服务的交叉口控制策略(First come first served, FCFS), 在大多数情况下, FCFS被证明可以降低延误[11-13]. 但是, Levin等[14]指出在过饱和、列队行驶等情况下, FCFS策略的延误比信号控制更大.
因此, 近年来国内外研究学者对如何提高AIC的效率的问题,展开了较多的研究. Li等[15]基于安全驾驶模式, 使用生成树(Spanning tree)模型, 建立了4种算法规划自动驾驶车辆在交叉口区域的行车轨迹. Ahmane等[16]使用Petri网对自动驾驶交叉口控制策略进行建模, 并与先到先服务策略进行了对比, 验证了模型效益. Carlino等[17]根据不同出行者之间时间价值的不同, 考虑驾驶员特性、与目的地的距离等因素, 建立了自动驾驶车辆通过交叉口的竞价模型, 最后对竞价造成的社会公平性问题进行了探讨. 此外, 区别于集中式的自动驾驶交叉口管控模式, 使用博弈论(Game theory)方法研究分布式的自动驾驶交叉口的自组织模型也成为目前研究的重要方向[18-19].
针对自动驾驶交叉口控制可能造成的组合爆炸问题[20], Wu等[20]使用蚁群算法对AIC问题进行优化, 并借助机器人实物模型验证了算法的有效性. Li等[21]使用了遗传算法搜寻控制模型的最优解. 此外, 基于车队优化和基于冲突点优化的AIC模型也相继被提出. Bashiri等[22]提出以自动驾驶车队为研究对象, 考虑车队中的车辆数、车队长度和车队等待时间, 调节AIC系统的整体效益. Medina等[23]提出了基于虚拟车队(Virtual platooning)的AIC方法, 能将不同车道不同方向的车辆进行组队控制. 基于冲突点优化方面, Lee等[24]借助航空管制的思路, 建立了使冲突距离最短的AIC模型, 并设计了鲁棒算法处理系统失效的问题. Zhu等[25]考虑车辆路径选择行为, 使用线性规划模型对自动驾驶下的交叉口进行管控. Müller等[26]使用混合整数线性规划模型, 将自动驾驶交叉口管控问题转化为三个控制子问题. Levin等[27]使用混合整数线性规划模型协调自动驾驶车辆在冲突点的通过时间, 并借助滚动时间窗的方式优化最优解. Fayazi等[28]建立了基于混合整数线性规划的自动驾驶交叉口控制模型, 优化自动驾驶环境下交叉口的车辆到达时间和行驶车速. Belkhouche[29]基于冲突点分离的思路, 使用拉格朗日函数求模型封闭解, 提出了非集中式的AIC模型.
以上方法均假设在进行AIC模型优化时, 自动驾驶车辆在交叉口内部的行驶路径提前确定且已知, 即假设自动驾驶车辆在交叉口选择的进口车道和出口车道已知且作为输入, 在此基础上进行AIC模型设计, 然而, 在多车道情况下, 自动驾驶车辆可以通过选择不同的进口车道或出口车道, 即通过调整车辆在交叉口内部行驶路径的方式规避冲突. He等[30]提出自动驾驶车辆在交叉口可以选择任意车道行驶, 但仍基于车道选择提前给定, 且基于先到先服务的方式建立AIC模型, 无法获得最优解. 本文的贡献主要在于:
1) 考虑自动驾驶车辆在交叉口内部的行驶路径不确定, 可以根据与其他车辆的冲突动态调整, 建立了考虑车辆最优进口道和出口道选择, 且能获得所有车辆整体延误最小的AIC模型.
2) 区别于已有大多研究中假设交叉口为对称型常规交叉口, 本文建立的AIC模型能适用于非常规交叉口, 例如进口道多于出口道的情况, 非常规交叉口将导致车辆在交叉口内部的行驶轨迹呈现较大不同, 加大了模型复杂度.
3) 区别于已有较多研究中将车辆和冲突点简化为质点, 本文模型考虑车辆实际尺寸, 对车辆在交叉口内部的行驶轨迹进行精确建模, 可为实地应用提供借鉴.
本文研究包括如下内容, 第1节为问题描述, 对本文研究的关键点进行直观阐述; 第2节对模型中的参数进行说明; 第3节为模型建立, 主要包括交叉口内部区域离散化模型、车辆在交叉口内部行驶路径、外边界投影降维法和冲突点约束模型; 第4节为模型求解; 第5节为模型验证与效益分析.
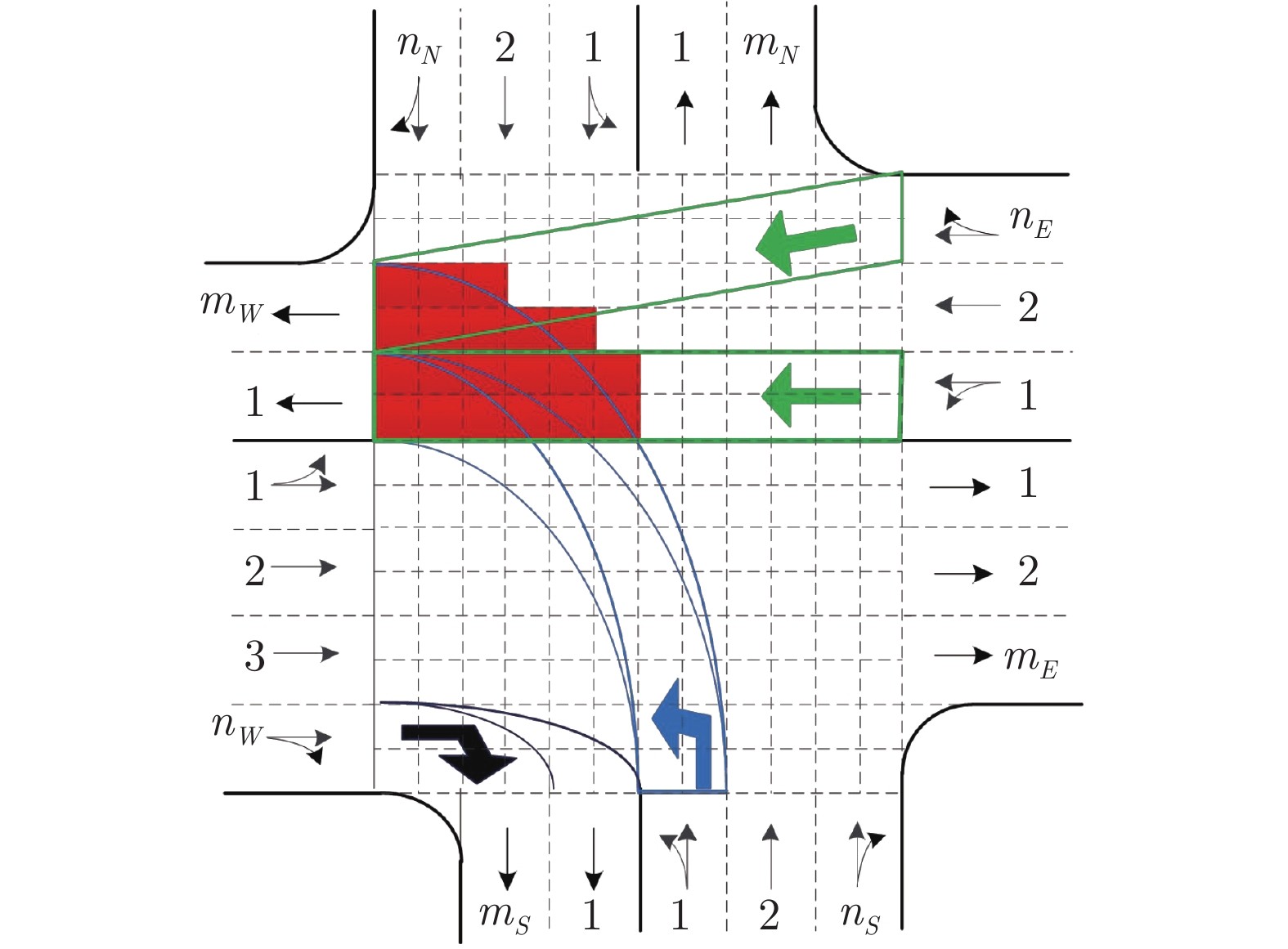
图 1 问题描述示意图
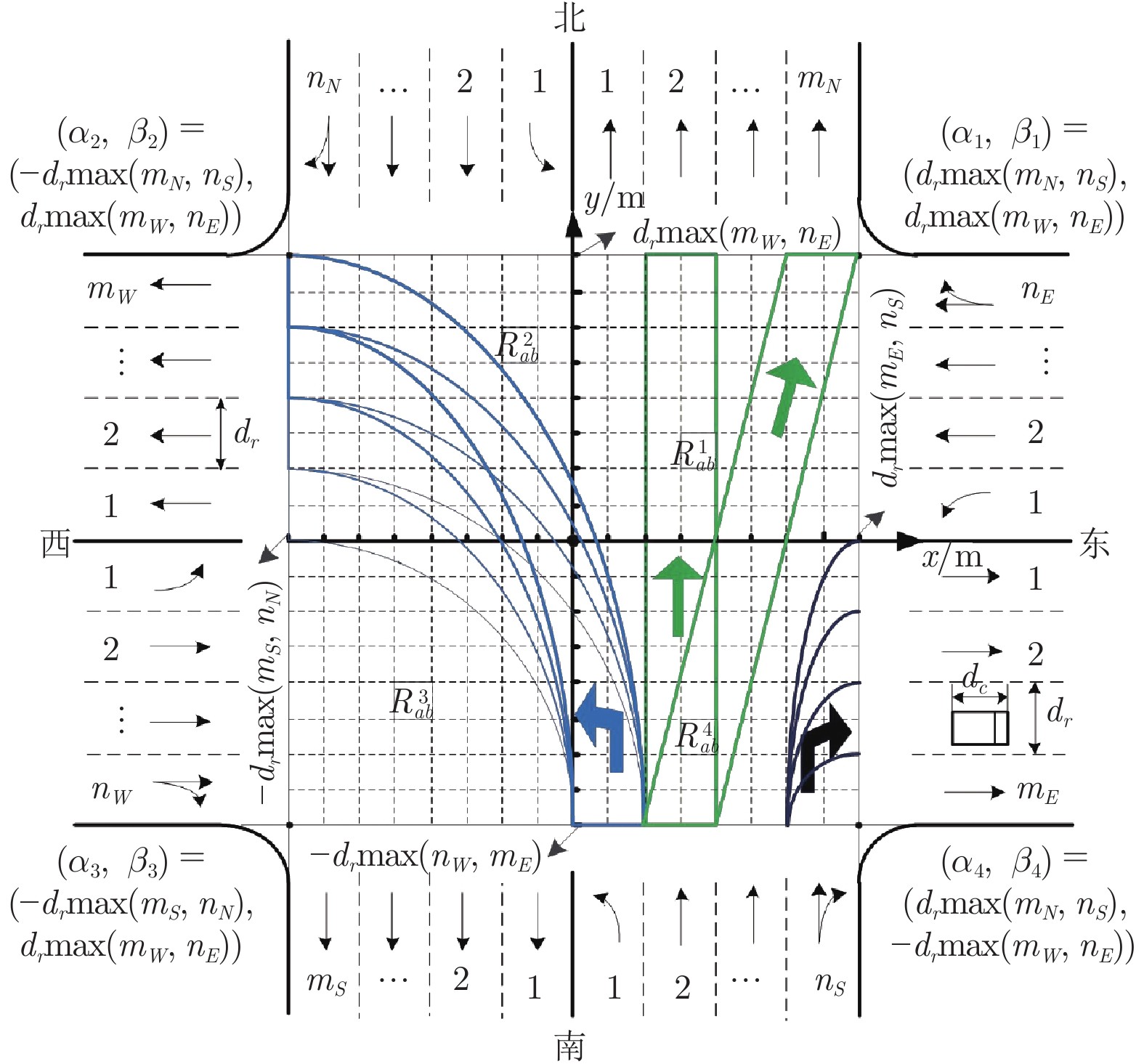
图 2 交叉口研究区域示意图
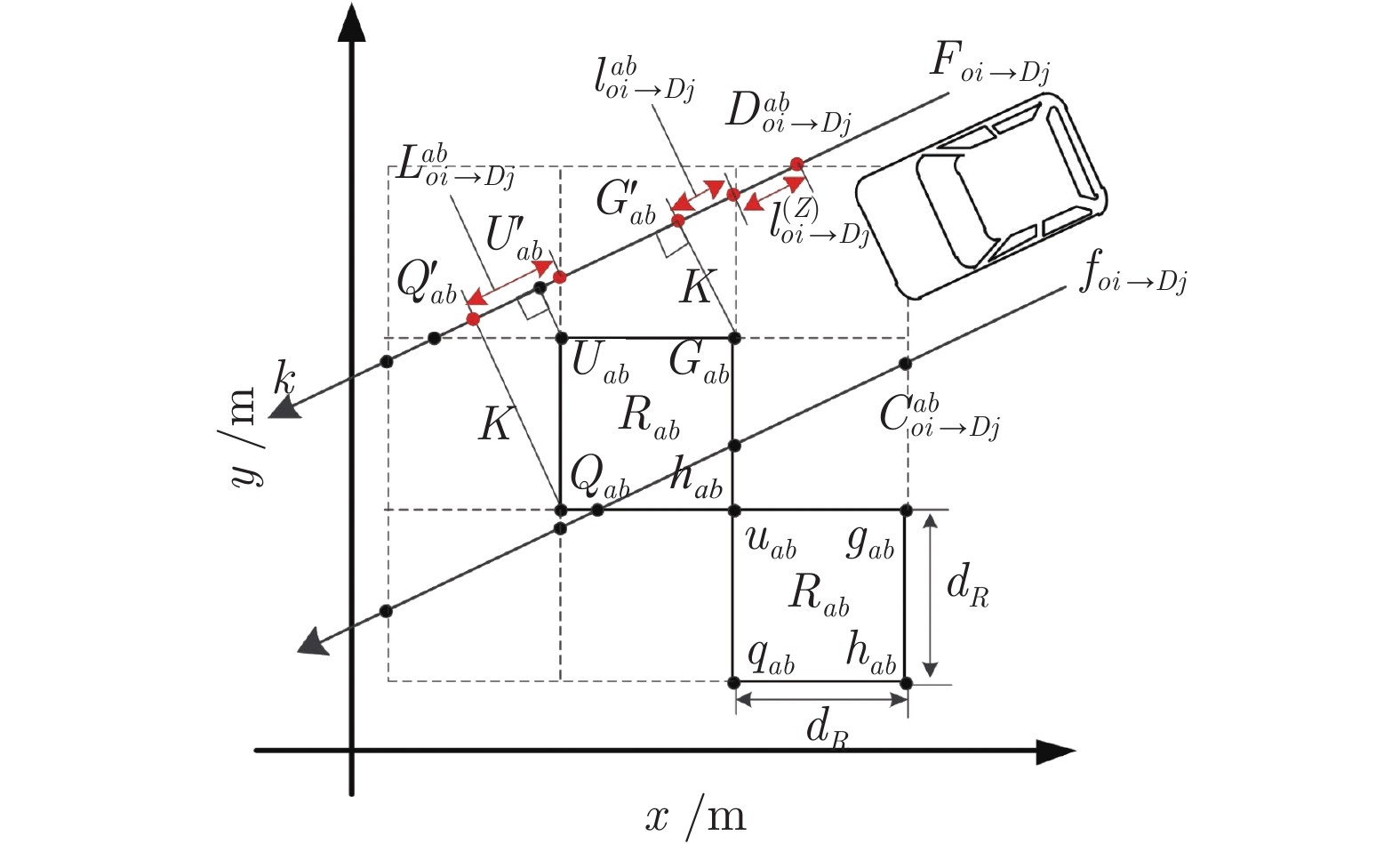
图 3 直行轨迹投影点示意图
自动驾驶环境下的交叉口管控是自动驾驶技术在城市道路应用的关键点, 在交叉口内部区域, 自动驾驶车辆的行驶路径和进入时刻是研究的重点. 已有研究大多假设行驶路径确定且已知, 将其作为输入研究最佳的进入时刻. 但在自动驾驶环境下, 由于无需信号灯控制, 可以针对每台车辆进行通行方案的优化, 车辆可以通过选择不同进口道和出口道的方式规避冲突, 因此, 可以同时优化车辆在交叉口内部的行驶路径和车辆进入交叉口的时刻.
本文正是基于上述思路, 将交叉口内部区域离散化, 建立直角坐标系确定网格的坐标方程. 考虑车辆的实际大小并面向非常规交叉口, 使用椭圆曲线建立转弯车辆行驶路径的精确轨迹方程, 再通过外边界投影降维法建立轨迹方程和交叉口空间的映射关系, 计算驶入和驶出网格的时刻. 建立冲突模型确保网格不被重叠占用, 确保车辆行驶安全, 模型以总延误最小为目标函数. 将模型在AMPL中编码, 使用CPLEX求解器求解. 对模型进行案例分析, 结果表明: 对比无路径规划模型、感应控制和先到先服务模型, 本文模型能显著降低车均延误, 提高交叉口空间利用率.
然而, 本文没有研究自动驾驶交叉口交通管控模型的求解算法, 在大量相互冲突的车辆同时到达交叉口时, 会存在求解变慢的问题, 可采用滚动时间窗的方法求解, 下一步也将研究更加高效的求解方法. 其次, 本文模型假设车辆在交叉口内部匀速行驶, 下一步可在考虑乘客舒适性的基础上, 优化自动驾驶车辆的行车速度. 此外, 下一步研究可考虑将基于预定(Reservation)的道路或车辆资源分配引入自动驾驶环境下的交叉口管控模型[32-33]. 最后, 不同需求和不同到达分布条件下的模型效益测试和仿真平台开发也是本文进一步的研究方向.
作者简介
吴伟
长沙理工大学交通运输工程学院副教授. 主要研究方向为自动驾驶与车路协同环境下的交通控制与管理. 本文通信作者.E-mail: jiaotongweiwu@csust.edu.cn
刘洋
长沙理工大学交通运输工程学院硕士研究生. 2017年获得长沙理工大学学士学位. 主要研究方向为交通控制和交叉口管理. E-mail: liuyang@stu.csust.edu.cn
刘威
澳大利亚新南威尔士大学工程学院助理教授. 主要研究方向为复杂交通系统建模与优化, 交通经济学, 大数据分析 E-mail: wei.liu@unsw.edu.au
吴国弘
北京交通大学博士研究生. 2018年获得长沙理工大学交通运输工程学院学士学位. 主要研究方向为联网自动车轨迹优化, 自治交叉口管理. E-mail: 19114013@bjtu.edu.cn
马万经
同济大学教授, 交通运输工程学院副院长. 主要研究方向为交通设计与控制, 车路协同和共享交通系统.E-mail: mawanjing@tongji.edu.cn
https://blog.sciencenet.cn/blog-3291369-1375689.html
上一篇:【IEEE/CAA JAS虚拟专题】非线性系统
下一篇:基于鲁棒正不变集的传感器故障区间估计