博文
基于改进Smith预估控制结构的二自由度PID控制
|
引用本文
尹成强, 高洁, 孙群, 赵颖. 基于改进Smith预估控制结构的二自由度PID控制. 自动化学报, 2020, 46(6): 1274-1282. doi: 10.16383/j.aas.2018.c170596
YIN Cheng-Qiang, GAO Jie, SUN Qun, ZHAO Ying. Two Degree of Freedom PID Control Based on Modified Smith Predictor Control Structure. ACTA AUTOMATICA SINICA, 2020, 46(6): 1274-1282. doi: 10.16383/j.aas.2018.c170596
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.2018.c170596
关键词
改进史密斯预估控制,二自由度,二阶不稳定过程,PID控制器
摘要
针对工业过程中的二阶不稳定时滞过程, 基于改进史密斯预估控制结构提出了一种简单的两自由度控制方案.设定值跟踪控制器和扰动抑制控制器采用同一设计程序, 并基于内模控制原理提出了控制器解析设计方案.设定值跟踪控制器和抗扰动控制器可分别通过单性能参数独立调节和优化, 每个控制器都具有PID形式, 给出了控制器调整参数的选择范围和扰动抑制闭环保证鲁棒稳定性的条件.仿真实例验证了提出方法对于近期其他方法的优越性.
文章导读
实际生产中, 大多数的工业过程都是稳定或临界稳定的, 但同时也存在着少数的不稳定过程, 它们难以控制, 尤其在系统存在明显时滞情况下.其主要原因在于不稳定极点容易导致很大的超调和较长的过渡时间, 并且系统输入输出的平衡状态很容易被外界干扰破坏[1].
针对不稳定时滞过程, 专家学者进行了大量的研究, 也取得了一系列的研究成果.其中, 基于单位反馈基础上提出的改进PID控制方法不断被提出.最近, 文献针对不稳定时滞对象采用直接合成法设计了PID控制器, 并基于灵敏度函数给出了参数调整方法[2].文献[3]针对二阶不稳定时滞对象给出了简单的PID调整方法, 采用了三个尺度参数计算传统PID控制器的比例、微分、积分三个参数. Zhang等[4-5]针对二阶和多阶不稳定时滞对象, 基于单位反馈控制结构和镜像方法设计的控制器, 系统抗扰动性能和鲁棒稳定性能有了明显提高.基于内模控制的PID控制不仅保持了传统PID控制特点, 而且具有内模控制的所有优点, 自提出以来就得到学者专家的青睐.针对不稳定时滞对象, 国内外众多专家学者在这个领域做了很多研究, 也有很多方法已应用到实际生产中, 取得较好的控制效果[6-11].随着智能控制技术的发展和先进算法研究的深入, 多种智能算法被应用于PID控制器参数整定[12-17], 与普通整定方法比, 其在设定值精确、快速跟踪方面性能更优, 但对控制器的处理能力要求更高.为确保控制系统同时具有良好的设定值跟踪性能和抗扰动性能, 针对不稳定时滞对象的二自由度控制方案相继被提出:利用Smith预估控制和内模控制的优势, 对其做结构上的改进, 提出了两自由度的Smith控制[18-20]和两自由度的内模控制[21-24], 也获得了比较满意的控制效果.另外, 针对不稳定时滞对象, 文献[25]提出一种基于并行控制结构和直接合成法的控制方案.文献[26-27]采用简单串级控制结构设计了不稳定时滞对象的控制方案, 其中内环用于稳定被控对象, 外环用于提高系统性能.针对不稳定时滞对象提出的这些二自由度控制方案都取得了不错的控制效果.
目前在二自由度控制系统设计过程中, 大都需要针对不同控制对象设计不同的设定值跟踪控制器和扰动抑制控制器, 并且通常设定值跟踪控制器和扰动抑制控制器的设计程序不同, 从而增加了控制器设计程序的任务量.为此本文在改进Smith预估控制基础上提出了一种简单二自由度控制方案, 基于内模原理形成了PID控制器整定方法, 此整定方法可用于三类二阶不稳定时滞对象的设定值控制器和扰动抑制控制器的设计.通过仿真研究可以看出, 提出的控制方案不仅可以大大减少控制器设计过程的复杂程度, 而且系统的设定值跟踪性能和抗扰动性能都优于近期文献中的控制效果.设计的控制器容易在过程控制的分布式控制系统(Distributed control system, DCS)或可编程序逻辑控制器(Programmable logic controller, PLC)中实现, 便于工程操作.
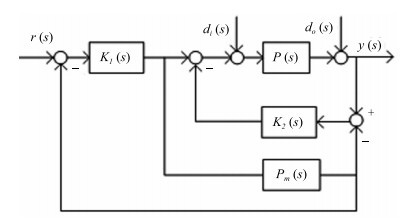
图 1 改进Smith控制结构
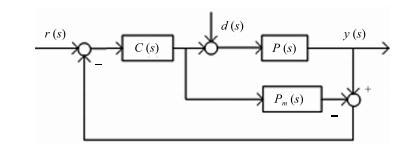
图 2 内模控制结构

图 3 单位反馈控制结构
针对三类二阶不稳定时滞对象提出了一种二自由度改进Smith预估控制方案, 基于内模控制原理提出的PID控制器解析设计方案不仅应用于设定值跟踪控制器设计而且也用于扰动抑制控制器的设计, 并且该控制器解析设计方案可适用于三类二阶不稳定时滞对象, 可在很大程度上减少控制器设计复杂性.系统标称设定值响应和扰动抑制响应完全解耦, 可通过单参数独立调整节和优化.仿真结果和性能指标表明本文提出的控制方案不仅能提高控制系统的设定值跟踪性能, 而且能够大大提高系统的抗干扰能力和鲁棒稳定性.
作者简介
高洁
聊城大学机械与汽车工程学院副教授.主要研究方向为交通控制与交通规划. E-mail: gaojie7983@163.com
孙群
聊城大学机械与汽车工程学院教授.主要研究方向为机器人技术, 测量与控制. E-mail: sunxiaoqun97@163.com
赵颖
聊城大学机械与汽车工程学院教授.主要研究方向为机器视觉, 机器人技术. E-mail: zhaoying@lcu.edu.cn
尹成强
聊城大学机械与汽车工程学院副教授.主要研究方向为过程控制与计算机控制.本文通信作者.E-mail: shtjycq@163.com
https://blog.sciencenet.cn/blog-3291369-1380222.html
上一篇:基于混核LSSVM的批特征风功率预测方法
下一篇:基于FlowS-Unet的遥感图像建筑物变化检测