博文
无人机激光雷达点云大样地树枝结构重建
||
来源:
本文同步发表在我们的公众号“趣用3D点云空间”,名字符合我一贯“有趣有用”的原则,目的是帮助大家“去用”3D点云,欢迎关注。

自评:
随着遥感分辨率越来越高,兼顾大范围和精细程度的产品与应用应该是发展趋势,而且三维也越来越不可或缺。个人见解,几年后看是否说中了。我在林业方向一直以来在做的“既见树木又见森林”和“既见森林又见树木”就是对上述理念的实践。
无人机激光雷达点云大样地树枝结构重建
1. 亮点
本研究提出一种可用于无人机激光雷达点云的树枝结构重建算法,并在塞罕坝机械林场实现2公顷样地每木树枝结构重建。该算法可同时完成枝叶分离和树枝重建,且树枝模型逼真度优于现有算法。
2. 文章
Cai, S., Zhang, W., Zhang, S., Yu, S., & Liang, X. (2024). Branch architecture quantification of large-scale coniferous forest plots using UAV-LiDAR data. Remote Sensing of Environment, 306, 114121.
2024年5月22日前,可通过如下链接免费阅读和下载论文:
https://authors.elsevier.com/c/1isOK7qzT3Dmn
3. 背景
树枝是构成树木结构的骨架,对森林的空间布局以及森林生态系统的功能和过程具有重要影响。地基激光雷达的出现使得树枝结构得以有效重建,其以毫米级精度和分辨率点云形式数字化树木结构,结合自动化树枝重建算法建模树枝结构。然而,地基激光雷达固定式多站点采样方式,工作量大,效率较低,每公顷样地通常需要3-8天的作业时间,因此目前树枝结构重建限制于小样地尺度(<0.1公顷)。近年来快速发展的无人机激光雷达,能够快速覆盖较大范围,并且观测距离近且观测角度大,较传统有人机激光雷达显著提高树木三维结构精细度。然而,无人机激光雷达受平台运动、定位误差影响,且自上而下的观测方式树冠遮挡问题突出,导致点云精度和密度较地基激光雷达点云低一个数量级,难以满足现有树枝重建算法的要求,造成重建效果不佳的问题。因此,本研究旨在利用无人机激光雷达点云,开发一种有效的树枝重建算法,以实现大规模树枝结构的量化。
4. 研究思路
为解决这一问题,本研究提出一种适用于无人机激光雷达点云的树枝结构重建算法。首先,使用一种树枝生长方向引导的区域生长算法分割树枝(图1a 和b);然后,基于3个树枝形态特征,包括树枝之间夹角、高差,以及树枝由树干至末梢距离,移除错误分割树枝(图1c);最后,基于点与树枝之间的距离分离枝叶点,并通过多项式拟合重建树枝模型,并从树枝模型中提取树枝结构参数(图1d)。
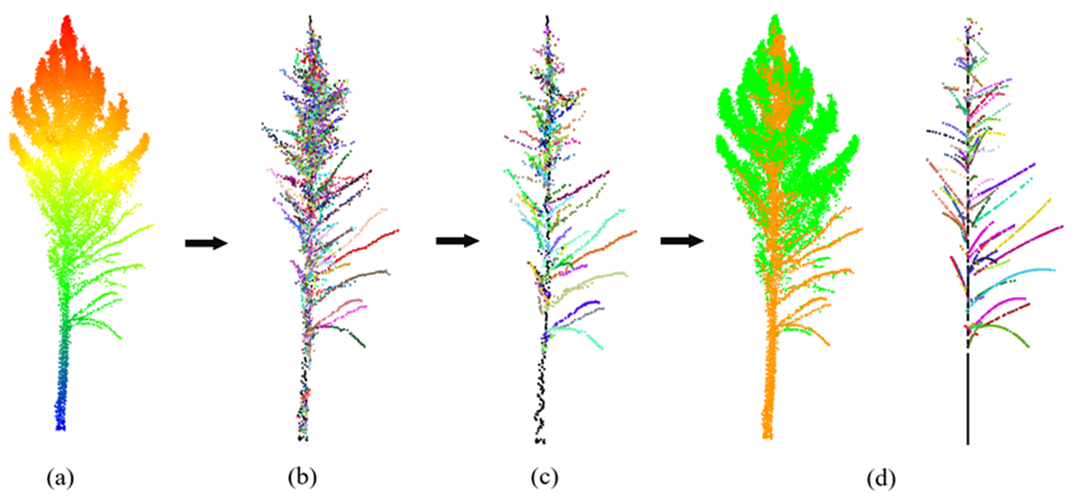
图1 算法流程图。(a)无人机激光雷达点云;(b)树枝分割;(c)树枝优化;(d)枝叶分离与树枝重建。
使用塞罕坝机械林场样地无人机激光雷达点云验证算法树枝重建性能。该样地面积超过2公顷,包括433棵树(图2a)。每木树枝重建结果如图2b所示。树枝识别的F-score为0.58,树枝长度和角度的相对均方根误差为36.87%和18.3%。
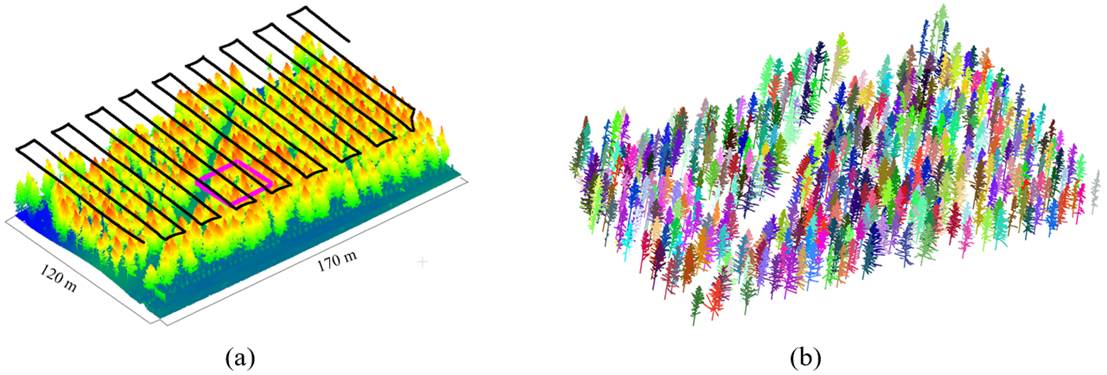
图2 塞罕坝机械林场2公顷落叶松样地无人机激光雷达点云和树枝重建结果。(a)无人机激光雷达点云;(b)树枝重建结果。
相比TreeQSM、AdTree和Laplacian算法,本研究算法生成的树枝结构逼真度更高(图3)。
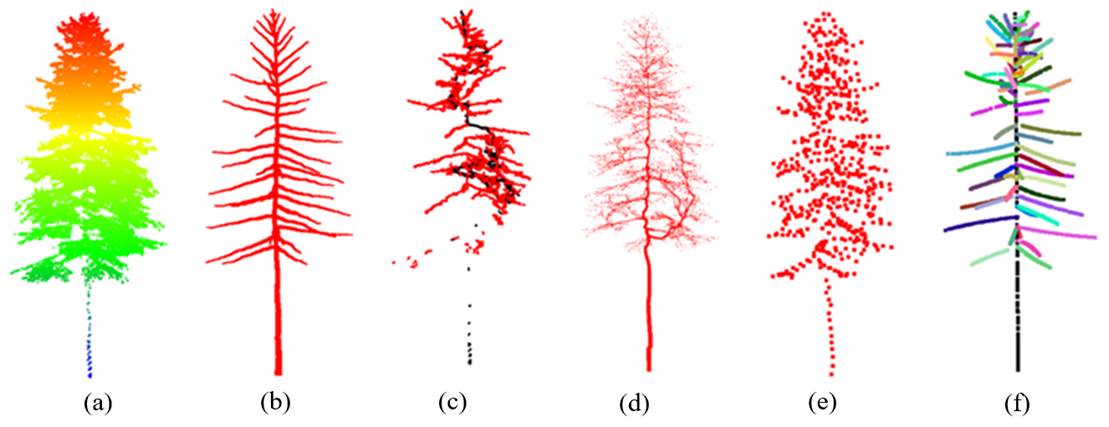
图3 树枝重建结果对比。(a)无人机激光雷达点云;(b)参考树枝;(c)-(f)TreeQSM、AdTree、Laplacian和本文算法树枝重建结果。
使用欧洲赤松、挪威云杉、新西兰辐射松无人机激光雷达点云测试了本研究算法的枝叶分离性能。结果显示,本研究算法枝叶分离精度为0.88,且能够提取出目视识别困难的树枝点云。
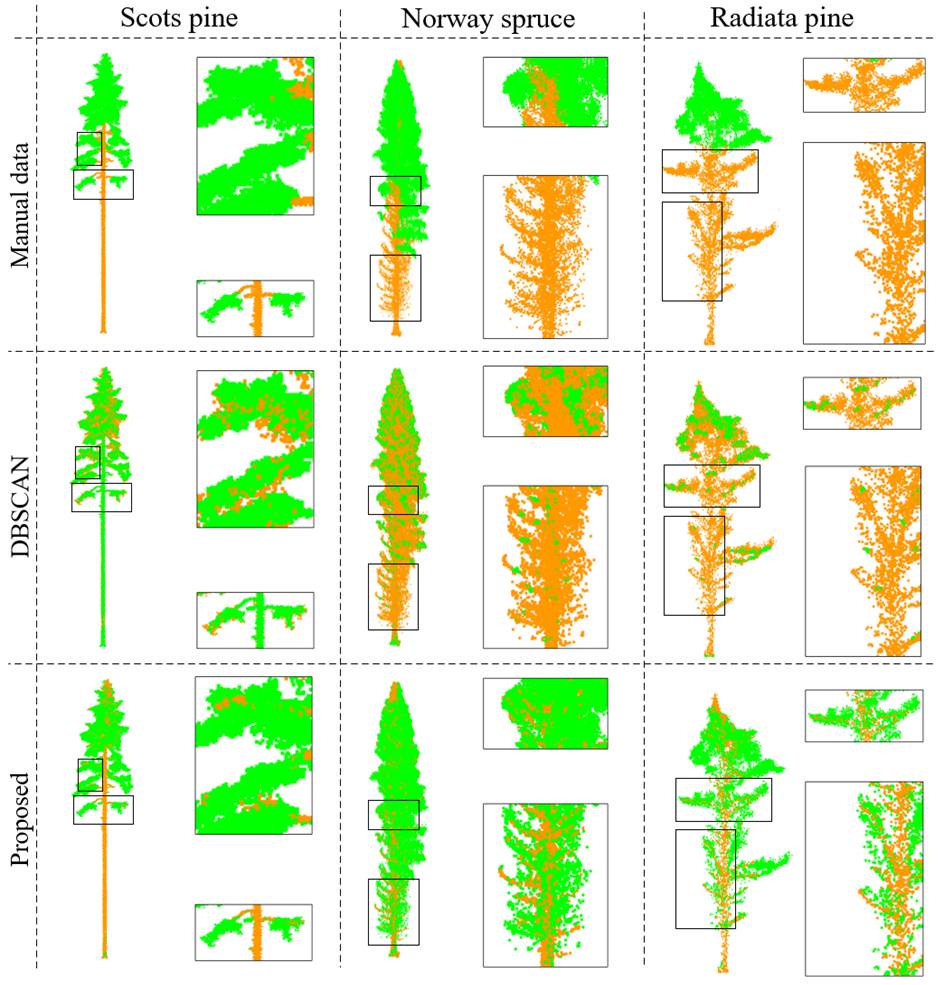
图4 欧洲赤松、挪威云杉、新西兰辐射松枝叶点云分离结果
5. 研究结论
该研究在大规模树枝结构量化方面取得了重要突破,为叶面积指数估计、林木育种、树种分类、生态系统等研究开辟了新的前景。
作者简介
第一作者
蔡尚书,2021年毕业于北京师范大学,获地图学与地理信息系统博士学位,2021-2023年在武汉大学从事博士后研究,2023年到中国林业科学研究院资源信息研究所工作。主要研究方向为近地面激光雷达森林三维场景重建与参数提取、布料模拟算法扩展应用。现主持、参与国家自然科学基金、国家重点研发计划等科研项目5项,发表论文20余篇。担任SCI期刊Forests客座编辑,JAG、T-ITS、AUTOMAT CONSTR等期刊审稿人。
通讯作者
张吴明,中山大学测绘科学与技术学院教授,海洋科学考察中心学科专业副主任。入选广东省“珠江人才计划”科技创新领军人才,担任中国测绘学会深空探测遥感测绘工作委员会副主任委员,国际数字地球学会中国国家委员会激光雷达专业委员会委员。研究方向为三维信息数字化、点云数据处理、激光雷达林业遥感、月球与行星测绘、海洋测绘等。在RSE、P&RS、AFM等地学领域顶级国际期刊发表高水平论文40余篇,所提出的点云地面滤波算法CSF不但成为ESI高被引论文,而且被国内外用户广泛使用。
梁欣廉,武汉大学测绘遥感信息工程国家重点实验室教授。主要研究方向为多源支持感知与认知,依托大数据、机器学习等技术,利用无人机、移动平台、主被动传感器实现复杂场景信息的感知与认知。在2021年和2022年被斯坦福大学列为世界科学家排名前2%(2022年排名前1%)。2016-2022年担任国际摄影测量协会(International Society for Photogrammetry and Remote Sensing)专题信息提取工作组主席,2022年至今担任遥感数据处理与理解工作组主席。且担任SCI一区期刊Forest Ecosystems副主编、Geo-spatial Information Science以及Remote Sensing的主编,为国际电气与电子工程师协会(IEEE)高级会员。
https://blog.sciencenet.cn/blog-2354721-1429383.html
上一篇:大模型对两个关于CSF灵魂拷问的回答