博文
0082:约束加权最小二乘算法(CWLS)在UWB传感器TOA定位模式LOS场景下的应用研究
|||
随着UWB传感器在室内定位市场中的大量应用,了解其基本的定位算法对于企业算法工程师或者刚入门的科研工作者具有重要的价值。因而,本文主要介绍UWB TOA定位模式下针对LOS场景提出的CWLS算法。
1. TOA模式基本定位原理
在TOA定位模式下,标签(移动站)分别会与固定基站进行通信,从而获得两两之间的信号飞行时间,通过时间与光速相乘,得到标签与每一个基站之间的距离。在每组定位过程中,依据基站的坐标和标签与基站之间的距离,从而可以计算得到标签的坐标。其基本原理公式为:
注释:M是基站数目,x和y为待求标签坐标,xi和yi为第i个基站二维笛卡尔坐标,di为标签与第i个基站之间的欧氏距离。 2. 最小二乘标准形式 通过对公式(1)进行两边平方处理后,可以将其转化成AX=b的标准形式(其实很多算法的本质都是跟最小二乘有关系的,比如卡尔曼滤波系列等): 注释:原文中的sita改成本帖的X,以便书写方便。 3. CWLS算法标准形式 注意到公式(8)中的X里面其实有三个变量,而三个变量之间存在特殊关系(如图2所示),故而可以构成CWLS的标准形式: 4. CWLS算法的基本解法 本文的CWLS解法,主要将约束条件挪到目标函数中,通过构造拉格朗日形式去除约束项,并通过求导技术进行对标签坐标和拉格朗日乘子进行逼近求解,从而获得高精度的定位解。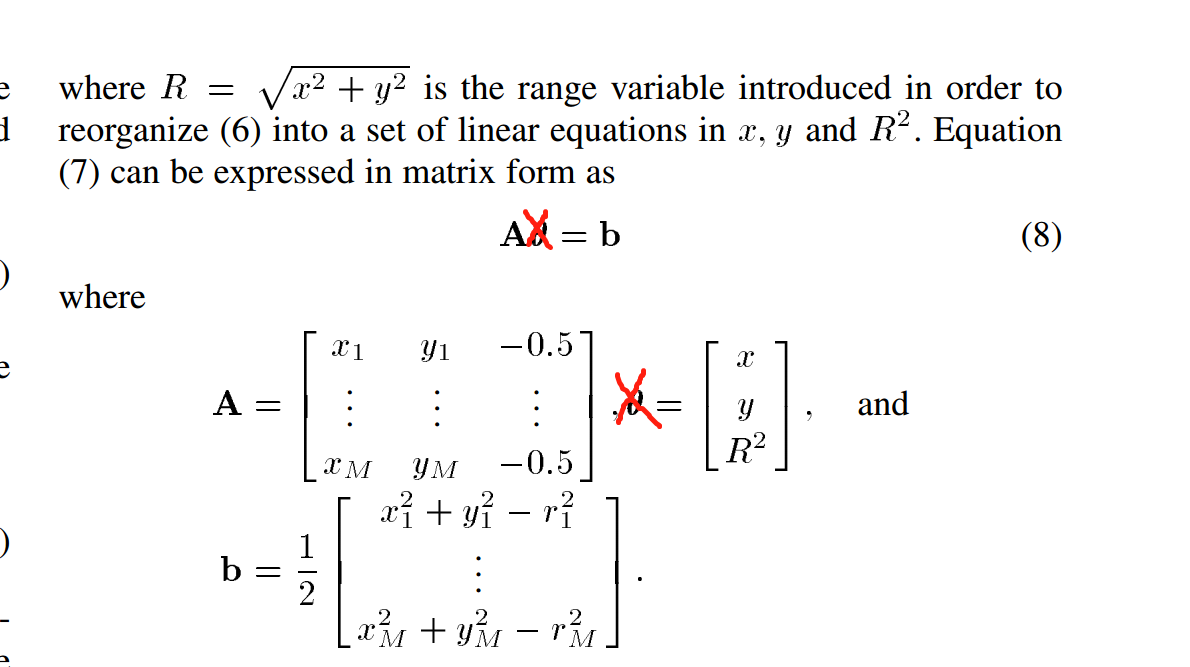
![]()
![]()

https://blog.sciencenet.cn/blog-2777453-1223500.html
上一篇:0080: 基于TOA定位模式的混合LOS/NLOS场景下凸优化高精度定位算法案例
下一篇:[转载]0093:基于TDOA定位模式LOS场景下的CWLS算法简介