博文
[转载]0095:AOA定位模式下的多步加权最小二乘算法
|||
说明:本文转载自微信公众号 室内定位算法技术咨询服务工作室 UWB2020
目前市场上定位的手段,主要有室外卫星定位技术、超宽带(UWB)定位技术、蓝牙定位技术、Wi-Fi定位技术(包括最新的CSI技术)、地磁技术、惯性导航技术等。不论采用何种定位技术,他们的定位模式大致可分为四类:TOA(time-of-arrival,到达时间)、TDOA(time-difference-of-arrival,到达时间差)、RSS(received signal strength,接收信号强度)和其他。结合前面的定位技术,可以分类为:
第一类~直接测量时间或者角度的TOA或AOA(angle-of-arrival,到达角)定位模式:卫星定位技术、UWB定位技术和蓝牙AOA
第二类~差分形式的TDOA或FDOA(到达频率差)或PDOA(到达相位差)定位模式:UWB
第三类~RSS定位模式:蓝牙,Wi-Fi,地磁等
第四类~自主推到模式:惯性定位(PDR为例)
本帖主要讲述纯AOA定位模式下的多步加权最小二乘算法,该算法主要适用于LOS(line-of-sight,视距)环境。
A. 算法流程归纳如下:
基本定位方程
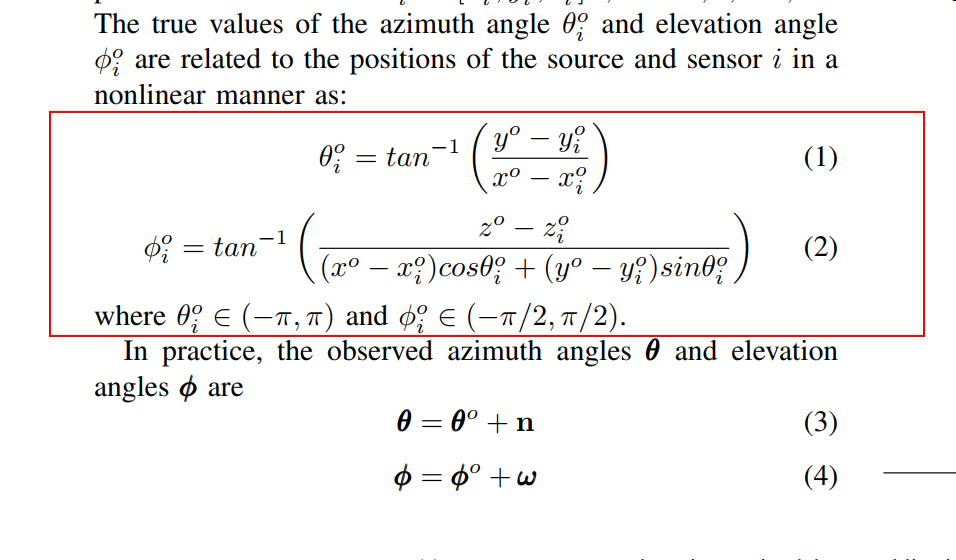
由于AOA是通过同时观测方位角(azimuth)和仰角(elevation)来实现三维定位,所以公式(3)和公式(4)反应出方位角和仰角存在噪声。由于论文只考虑LOS场景,所以这个噪声相对较小,在学术上一般采用高斯白噪声进行仿真研究。
2. 分别对方位角和仰角构造最小二乘Ax=b的形式

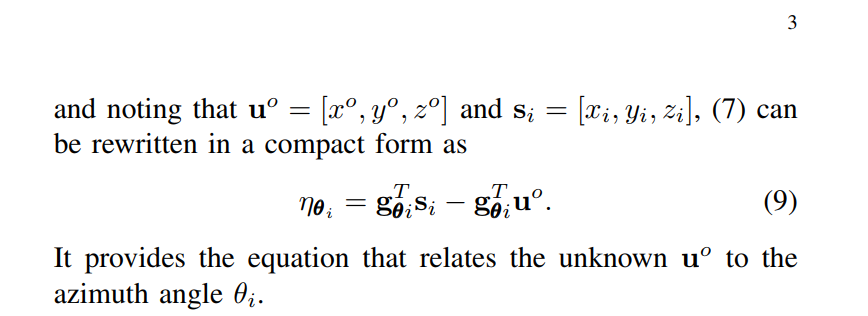
对于方位角而言在这里U是最小二乘里面的带求坐标x,g是观测矩阵A。
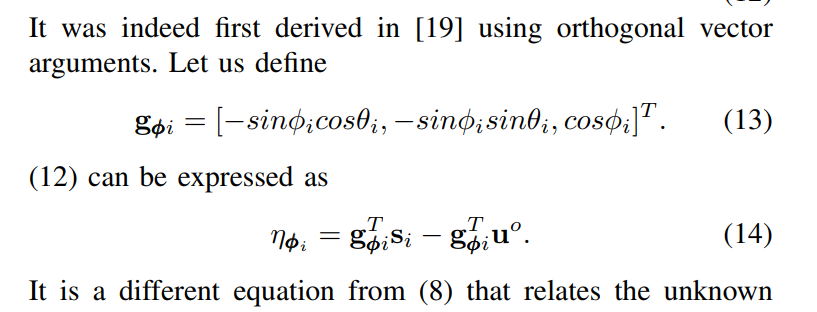
对于仰角方程,各个参数也可以参考最小二乘形式。
3. 联立两个最小二乘,从而得到最小二乘解(第一步)
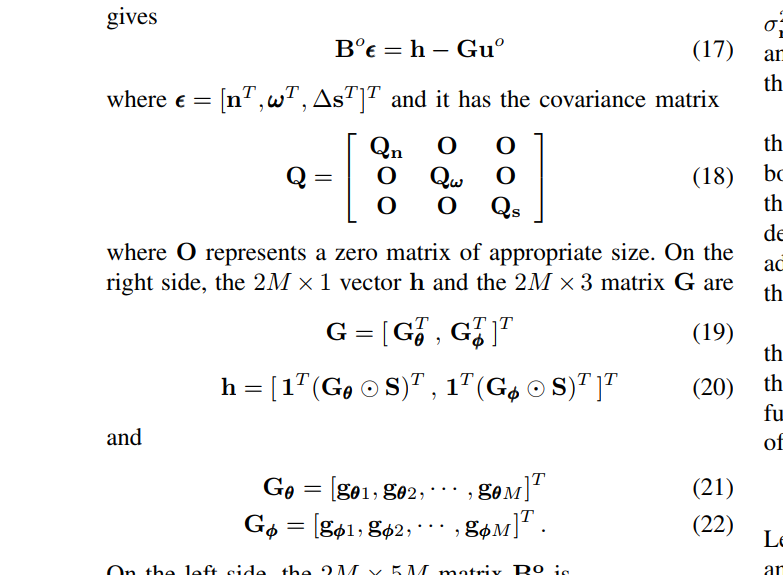
4.计算权重矩阵,获得加权最小二乘的解

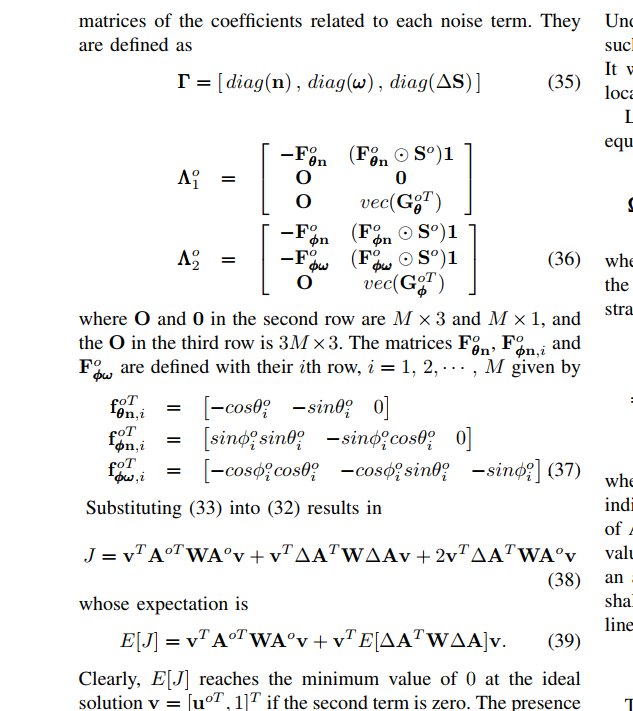
上面都是将高斯噪声带入两个角度基本观测方程,然后化简,从而或者权重递推公式BQB里面的矩阵B。
依据上面的公式,可以计算出B矩阵,Q矩阵是一个先验噪声协方差矩阵,在学术界一般都是单位阵,或者单位阵的倍数。在工程界,可以有传感器的误差进行测量得到。
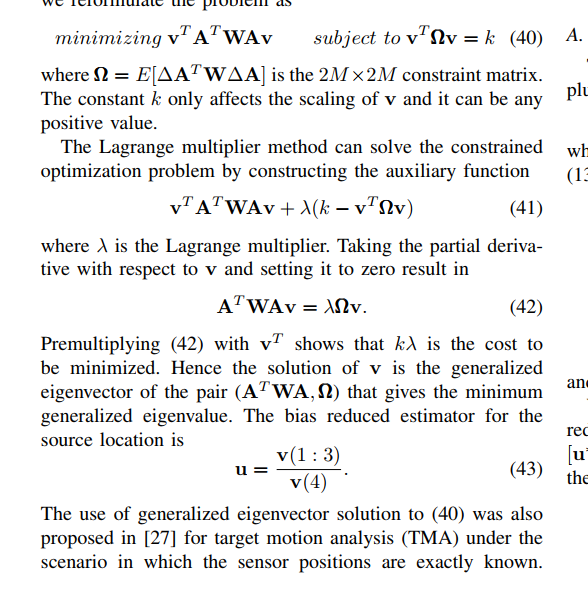
5. 考虑观测矩阵存在误差,进行第二次加权最小二乘解
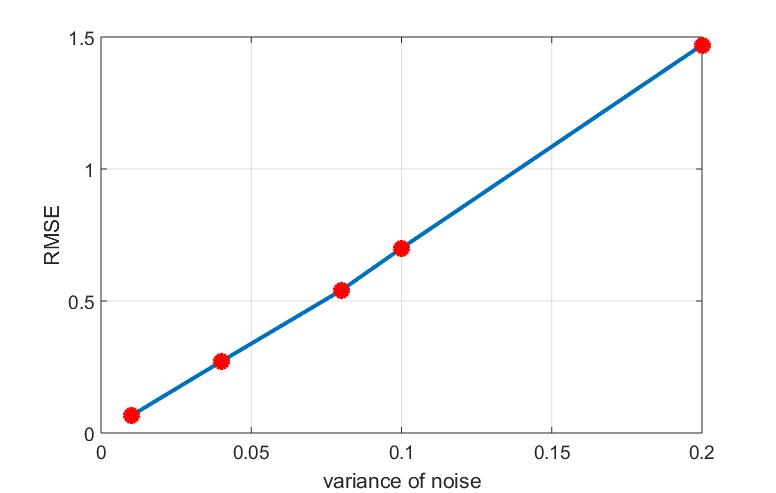
B. 算法程序仿真图
C. 本文算法评价
目前针对LOS场景下的算法论文依旧很多,但是对于工业界而言,价值相对有限,更多的研究关注点应转向混合LOS/NLOS场景。
D. 欢迎微信扫码关注公众号

https://blog.sciencenet.cn/blog-2777453-1249637.html
上一篇:0094:基于TDOA和RSS融合的信号强度加权定位算法