博文
kirchhoff叠前时间偏移源代码(SU修改版)
||
SU的PSTM只能做单个offset偏移,要求输入数据每道数据等间隔CDP,且要求速度CDP等间隔,稍作修改可以实现任意数据集的偏移。但实际处理的时候最好还是按offset输出结果用sustack叠加。注意输入速度文件需要连续CDP从1开始。
/* Copyright (c) Colorado School of Mines, 2011.*/
/* All rights reserved. */
/* SUKTMIG2D: $Revision: 1.7 $ ; $Date: 2013/08/14 18:34:35 $*/
#include "su.h"
#include "segy.h"
#include "header.h"
#include "stdio.h"
#include "stdlib.h"
/*********************** self documentation **********************/
char *sdoc[] = {
" ",
" SUKTMIG2D - prestack time migration of a common-offset",
"section with the double-square root (DSR) operator",
"",
" ",
" suktmig2d < infile vfile= [parameters] > outfile",
" ",
" Required Parameters:",
" vfile=rms velocity file (units/s) v(t,x) as a function",
"of time",
" dx=distance (units) between consecutive traces",
"",
" Optional parameters:",
" fcdpdata=tr.cdpfirst cdp in data",
" firstcdp=fcdpdatafirst cdp number in velocity file",
" lastcdp=from headerlast cdp number in velocity file",
" dcdp=from headernumber of cdps between consecutive traces",
" angmax=40maximum aperture angle for migration (degrees)",
" hoffset=.5*tr.offsethalf offset (m)",
" nfc=16number of Fourier-coefficients to approximate",
"low-pass",
"filters. The larger nfc the narrower the filter",
" fwidth=5 high-end frequency increment for the low-pass",
" filters",
" in Hz. The lower this number the more the number",
"of lowpass filters to be calculated for each ",
"input trace.",
"",
" Caveat: this code may need some work",
" Notes:",
" Data must be preprocessed with sufrac to correct for the",
" wave-shaping factor using phasefac=.25 for 2D migration.",
"",
" Input traces must be sorted into offset and cdp number.",
" The velocity file consists of rms velocities for all CMPs as a",
" function of vertical time and horizontal position v(t,x)",
" in C-style binary floating point numbers. It's easiest to ",
" supply v(t,x) that has the same dimensions as the input data to",
" be migrated. Note that time t is the fast dimension in these ",
" the input velocity file.",
" ",
" The units may be feet or meters, as long as these are",
" consistent.",
" Antialias filter is performed using (Gray,1992, Geoph. Prosp), ",
" using nc low- pass filtered copies of the data. The cutoff",
" frequencies are calculated as fractions of the Nyquist",
" frequency.",
"",
" The maximum allowed angle is 80 degrees(a 10 degree taper is ",
" applied to the end of the aperture)",
NULL };
#define LOOKFAC 2 /* Look ahead factor for npfaro */
#define PFA_MAX 720720 /* Largest allowed nfft */
/* Prototype of functions used internally */
void lpfilt(int nfc, int nfft, float dt, float fhi, float *filter);
segy intrace; /* input traces */
segy outtrace;/* migrated output traces */
int
main(int argc, char **argv)
{
int i, k, imp, iip, it, ix, ifc;/* counters */
int ntr, nt;/* x,t */
int cdp_all = 4200;
int verbose;/* is verbose?*/
int nc;/* number of low-pass filtered versions*/
/* of the data for antialiasing*/
int nfft, nf;/* number of frequencies*/
int nfc;/* number of Fourier coefficients for low-pass filter */
int fwidth;/* high-end frequency increment for the low-pass */
/* filters */
int firstcdp = 0;/* first cdp in velocity file*/
int lastcdp = 0;/* last cdp in velocity file*/
int oldcdp = 0;/* temporary storage*/
int fcdpdata = 0;/* first cdp in the data*/
int olddeltacdp = 0;
int deltacdp;
int ncdp = 0;/* number of cdps in the velocity file*/
int dcdp = 0;/* number of cdps between consecutive traces */
float dx = 0.0;/* cdp sample interval */
float hoffset = 0.0; /* half receiver-source */
float p = 0.0;/* horizontal slowness of the migration operator */
float pmin = 0.0;/* maximum horizontal slowness for which there's */
/* no aliasing of the operator */
float dt;/* t sample interval */
float h;/* offset */
float x;/* aperture distance */
float xmax = 0.0;/* maximum aperture distance */
float obliq;/* obliquity factor */
float geoms;/* geometrical spreading factor */
float angmax; /* maximum aperture angle */
float mp, ip;/* mid-point and image-point coordinates */
float t;/* time */
float t0;/* vertical traveltime */
float tmax;/* maximum time */
float fnyq;/* Nyquist frequency */
float ang;/* aperture angle */
float angtaper = 0.0;/* aperture-angle taper */
float v;/* velocity */
float *fc = NULL;/* cut-frequencies for low-pass filters */
float *filter = NULL;/* array of low-pass filter values */
float **vel = NULL;/* array of velocity values from vfile */
float **data = NULL;/* input data array*/
float **lowpass = NULL; /* low-pass filtered version of the trace */
float **mig = NULL;/* output migrated data array */
float **migcrp; = NULL;
float **crp = NULL;
float ofs1 = 0;
float ofs2 = 0;
register float *rtin = NULL, *rtout = NULL;/* real traces */
register complex *ct = NULL; /* complex trace */
/* file names */
char *vfile = "";/* name of velocity file */
FILE *vfp = NULL;
FILE *tracefp = NULL;/* temp file to hold traces*/
FILE *hfp = NULL;/* temp file to hold trace headers */
float datalo[8], datahi[8];
int itb, ite;
float firstt, amplo, amphi;
cwp_Bool check_cdp = cwp_false;/* check cdp in velocity file*/
/* Hook up getpar to handle the parameters */
initargs(argc, argv);
requestdoc(0);
/* Get info from first trace */
if (!gettr(&intrace)) err("can't get first trace");
nt = intrace.ns;
dt = (float)intrace.dt / 1000000;
tmax = (nt - 1)*dt;
MUSTGETPARFLOAT("dx", &dx);
MUSTGETPARSTRING("vfile", &vfile);
if (!getparfloat("angmax", &angmax)) angmax = 40;
if (!getparint("firstcdp", &firstcdp)) firstcdp = intrace.cdp;
if (!getparint("fcdpdata", &fcdpdata)) fcdpdata = intrace.cdp;
if (!getparfloat("hoffset", &hoffset)) hoffset = .5*intrace.offset;
if (!getparint("nfc", &nfc)) nfc = 16;
if (!getparint("fwidth", &fwidth)) fwidth = 5;
if (!getparint("verbose", &verbose)) verbose = 0;
h = hoffset;
/* Store traces in tmpfile while getting a count of number of traces */
tracefp = etmpfile();
hfp = etmpfile();
ntr = 0;
firstcdp = 1000000;
lastcdp = 1;
int *cdpnum;
float *offsetnum;
cdpnum=alloc1int(64028);
offsetnum = alloc1float(64028);
do {
++ntr;
if (intrace.cdp >= lastcdp) lastcdp = intrace.cdp;
if (intrace.cdp <= firstcdp) firstcdp = intrace.cdp;
cdpnum[ntr-1] = intrace.cdp;
offsetnum[ntr-1] = intrace.offset;
efwrite(&intrace, HDRBYTES, 1, hfp);
efwrite(intrace.data, FSIZE, nt, tracefp);
} while (gettr(&intrace));
checkpars();
/* error trappings */
if ((firstcdp == lastcdp)
|| (dcdp == 0)
|| (check_cdp == cwp_true)) warn("Check cdp values in data!");
/* rewind trace file pointer and header file pointer */
erewind(tracefp);
erewind(hfp);
/* Set up FFT parameters */
nfft = npfaro(nt, LOOKFAC*nt);
if (nfft >= SU_NFLTS || nfft >= PFA_MAX)
err("Padded nt=%d -- too big", nfft);
nf = nfft / 2 + 1;
/* Determine number of filters for antialiasing */
fnyq = 1.0 / (2 * dt);
nc = ceil(fnyq / fwidth);
if (verbose)
warn(" The number of filters for antialiasing is nc= %d", nc);
/* Allocate space */
data = alloc2float(nt, ntr);
lowpass = alloc2float(nt, nc + 1);
mig = alloc2float(nt, cdp_all);
migcrp = alloc2float(nt, cdp_all);
crp = alloc2float(nt,42*72);
vel = alloc2float(nt, cdp_all);
fc = alloc1float(nc + 1);
rtin = ealloc1float(nfft);
rtout = ealloc1float(nfft);
ct = ealloc1complex(nf);
filter = alloc1float(nf);
/* Read data from temporal array */
for (ix = 0; ix<ntr; ++ix){
efread(data[ix], FSIZE, nt, tracefp);
}
/* read velocities */
vfp = efopen(vfile, "r");
efread(vel[0], FSIZE, nt*cdp_all, vfp);
efclose(vfp);
/* Zero all arrays */
memset((void *)mig[0], 0, nt*cdp_all*FSIZE);
memset((void *)migcrp[0], 0, nt*cdp_all*FSIZE);
memset((void *)crp[0], 0, nt*42*72*FSIZE);
memset((void *)rtin, 0, nfft*FSIZE);
memset((void *)filter, 0, nf*FSIZE);
memset((void *)lowpass[0], 0, nt*(nc + 1)*FSIZE);
/* Calculate cut frequencies for low-pass filters */
for (i = 1; i<nc + 1; ++i){
fc[i] = fnyq*i / nc;
}
/* Start the migration process */
/* Loop over input mid-points first */
if (verbose) warn("Starting migration process...n");
int itrace;
for (itrace = 0; itrace<ntr; ++itrace){
float perc;
imp = cdpnum[itrace];
mp = imp*dx;
perc = itrace*100.0 / (ntr - 1);
if (fmod(itrace * 100, ntr - 1) == 0 && verbose)
warn("migrated %gn ", perc);
warn("itrace= %d cdp= %d offset= % ", itrace ,cdpnum[itrace],offsetnum[itrace]);
/* Calculate low-pass filtered versions */
/* of the data to be used for antialiasing */
//for (it = 0; it<nt; ++it){
//rtin[it] = data[imp][it];
//}
for (ifc = 1; ifc<nc + 1; ++ifc){
memset((void *)rtout, 0, nfft*FSIZE);
memset((void *)ct, 0, nf*FSIZE);
lpfilt(nfc, nfft, dt, fc[ifc], filter);
pfarc(1, nfft, data[itrace], ct);
for (it = 0; it<nf; ++it){
ct[it] = crmul(ct[it], filter[it]);
}
pfacr(-1, nfft, ct, rtout);
for (it = 0; it<nt; ++it){
lowpass[ifc][it] = rtout[it];
}
}
/* Loop over vertical traveltimes */
for (it = 0; it<nt; ++it){
int lx, ux;
t0 = it*dt;
v = vel[imp][it];
xmax = tan((angmax + 10.0)*PI / 180.0)*v*t0;
lx = MAX(0, imp - ceil(xmax / dx));
ux = MIN(cdp_all, imp + ceil(xmax / dx));
/* loop over output image-points to the left of the midpoint */
for (iip = imp; iip>lx; --iip){
float ts, tr;
int fplo = 0, fphi = 0;
float ref, wlo, whi;
ip = iip*dx;
x = ip - mp;
ts = sqrt(pow(t0 / 2, 2) + pow((x + h) / v, 2));
tr = sqrt(pow(t0 / 2, 2) + pow((h - x) / v, 2));
t = ts + tr;
if (t >= tmax) break;
geoms = sqrt(1 / (t*v));
obliq = sqrt(.5*(1 + (t0*t0 / (4 * ts*tr))
- (1 / (ts*tr))*sqrt(ts*ts - t0*t0 / 4)*sqrt(tr*tr - t0*t0 / 4)));
ang = 180.0*fabs(acos(t0 / t)) / PI;
if (ang <= angmax) angtaper = 1.0;
if (ang>angmax) angtaper = 0;
/* Evaluate migration operator slowness p to determine */
/* the low-pass filtered trace for antialiasing */
pmin = 1 / (2 * dx*fnyq);
p = fabs((x + h) / (pow(v, 2)*ts) + (x - h) / (pow(v, 2)*tr));
if (p>0){ fplo = floor(nc*pmin / p); }
if (p == 0){ fplo = nc; }
ref = fmod(nc*pmin, p);
wlo = 1 - ref;
fphi = ++fplo;
whi = ref;
itb = MAX(ceil(t / dt) - 3, 0);
ite = MIN(itb + 8, nt);
firstt = (itb - 1)*dt;
/* Move energy from CMP to CIP */
if (fplo >= nc){
for (k = itb; k<ite; ++k){
datalo[k - itb] = lowpass[nc][k];
}
ints8r(8, dt, firstt, datalo, 0.0, 0.0, 1, &t, &lo);
mig[iip][it] += geoms*obliq*angtaper*amplo;
}
else if (fplo<nc){
for (k = itb; k<ite; ++k){
datalo[k - itb] = lowpass[fplo][k];
datahi[k - itb] = lowpass[fphi][k];
}
ints8r(8, dt, firstt, datalo, 0.0, 0.0, 1, &t, &lo);
ints8r(8, dt, firstt, datahi, 0.0, 0.0, 1, &t, &hi);
mig[iip][it] += geoms*obliq*angtaper*(wlo*amplo + whi*amphi);
}
}
/* loop over output image-points to the right of the midpoint */
for (iip = imp + 1; iip<ux; ++iip){
float ts, tr;
int fplo = 0, fphi;
float ref, wlo, whi;
ip = iip*dx;
x = ip - mp;
t0 = it*dt;
ts = sqrt(pow(t0 / 2, 2) + pow((x + h) / v, 2));
tr = sqrt(pow(t0 / 2, 2) + pow((h - x) / v, 2));
t = ts + tr;
if (t >= tmax) break;
geoms = sqrt(1 / (t*v));
obliq = sqrt(.5*(1 + (t0*t0 / (4 * ts*tr))
- (1 / (ts*tr))*sqrt(ts*ts
- t0*t0 / 4)*sqrt(tr*tr
- t0*t0 / 4)));
ang = 180.0*fabs(acos(t0 / t)) / PI;
if (ang <= angmax) angtaper = 1.0;
if (ang>angmax) angtaper = 0;
/* Evaluate migration operator slowness p to determine the */
/* low-pass filtered trace for antialiasing */
pmin = 1 / (2 * dx*fnyq);
p = fabs((x + h) / (pow(v, 2)*ts) + (x - h) / (pow(v, 2)*tr));
if (p>0){
fplo = floor(nc*pmin / p);
}
if (p == 0){
fplo = nc;
}
ref = fmod(nc*pmin, p);
wlo = 1 - ref;
fphi = fplo + 1;
whi = ref;
itb = MAX(ceil(t / dt) - 3, 0);
ite = MIN(itb + 8, nt);
firstt = (itb - 1)*dt;
/* Move energy from CMP to CIP */
if (fplo >= nc){
for (k = itb; k<ite; ++k){
datalo[k - itb] = lowpass[nc][k];
}
ints8r(8, dt, firstt, datalo, 0.0, 0.0, 1, &t, &lo);
mig[iip][it] += geoms*obliq*angtaper*amplo;
}
else if (fplo<nc){
for (k = itb; k<ite; ++k){
datalo[k - itb] = lowpass[fplo][k];
datahi[k - itb] = lowpass[fphi][k];
}
ints8r(8, dt, firstt, datalo, 0.0, 0.0, 1, &t, &lo);
ints8r(8, dt, firstt, datahi, 0.0, 0.0, 1, &t, &hi);
mig[iip][it] += geoms*obliq*angtaper*(wlo*amplo + whi*amphi);
}
}
}
}
/* Output migrated data */
erewind(hfp);
for (ix = 0; ix<cdp_all; ++ix) {
efread(&outtrace, HDRBYTES, 1, hfp);
for (it = 0; it<nt; ++it) {
outtrace.data[it] = mig[ix][it];
}
puttr(&outtrace);
}
efclose(hfp);
return(CWP_Exit());
}
void
lpfilt(int nfc, int nfft, float dt, float fhi, float *filter)
/*******************************************************************************
lpfilt -- low-pass filter using Lanczos Smoothing
(R.W. Hamming:"Digital Filtering",1977)
****************************************************************************
Input:
nfcnumber of Fourier coefficients to approximate ideal filter
nfftnumber of points in the fft
dttime sampling interval
fhicut-frequency
Output:
filter array[nf] of filter values
*****************************************************************************
Notes: Filter is to be applied in the frequency domain
*****************************************************************************
Author: CWP: Carlos Pacheco 2006
*****************************************************************************/
{
int i, j; /* counters */
int nf; /* Number of frequencies (including Nyquist) */
float onfft; /* reciprocal of nfft */
float fn; /* Nyquist frequency */
float df; /* frequency interval */
float dw; /* frequency interval in radians */
float whi;/* cut-frequency in radians */
float w; /* radian frequency */
nf = nfft / 2 + 1;
onfft = 1.0 / nfft;
fn = 1.0 / (2 * dt);
df = onfft / dt;
whi = fhi*PI / fn;
dw = df*PI / fn;
for (i = 0; i<nf; ++i){
filter[i] = whi / PI;
w = i*dw;
for (j = 1; j<nfc; ++j){
float c = sin(whi*j)*sin(PI*j / nfc) * 2 * nfc / (PI*PI*j*j);
filter[i] += c*cos(j*w);
}
}
}
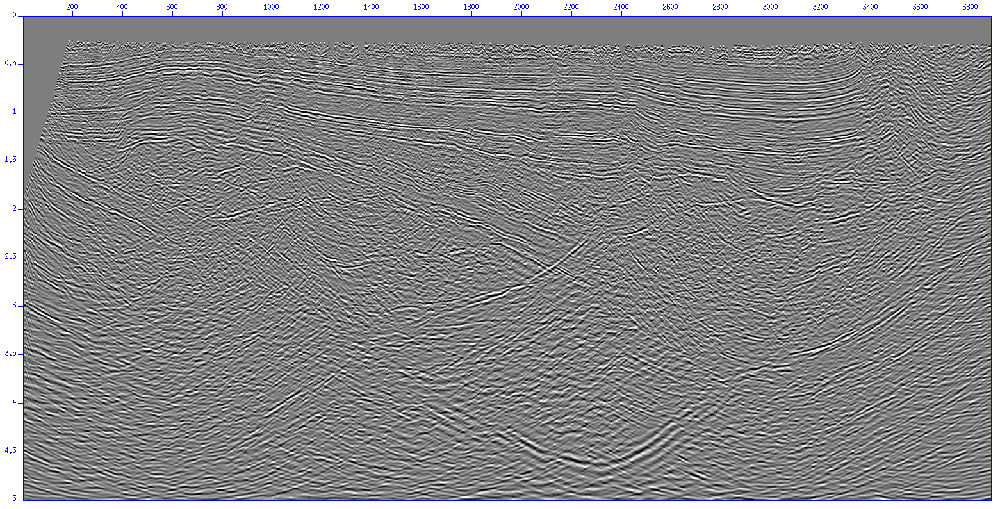
二维偏移结果:
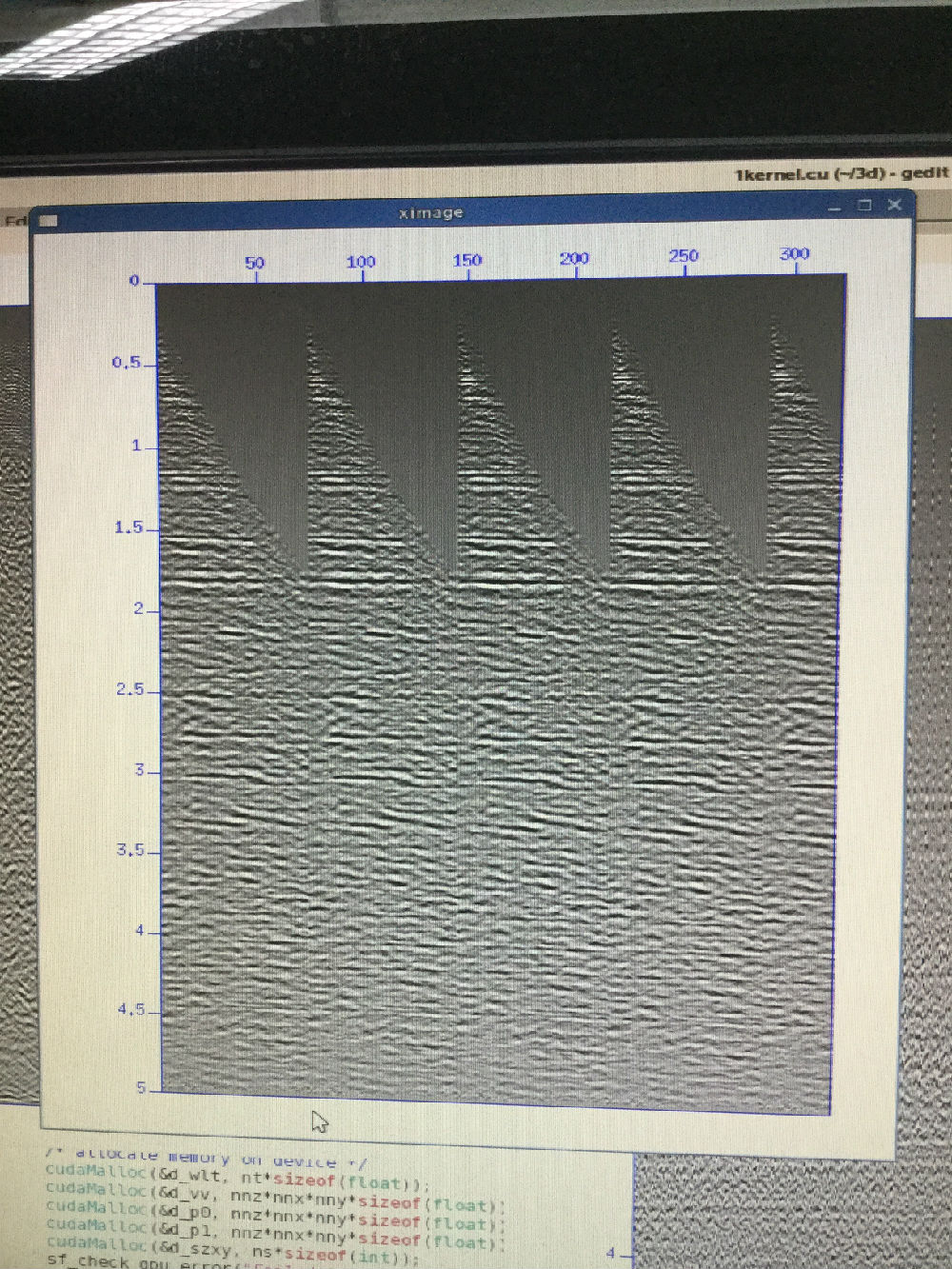
CRP道集:
https://blog.sciencenet.cn/blog-2834901-1054704.html
上一篇:SU实现Sigsbee模型的叠前深度偏移
下一篇:如何用Seismic Unix画出漂亮的地震剖面图