博文
基于事件触发的AUVs固定时间编队控制
|
引用本文
王洪斌, 高静, 苏博, 王跃灵. 基于事件触发的AUVs固定时间编队控制. 自动化学报, 2022, 48(9): 2277−2287 doi: 10.16383/j.aas.c190816
Wang Hong-Bin, Gao Jing, Su Bo, Wang Yue-Ling. Fixed-time formation of AUVs based on event-triggered control. Acta Automatica Sinica, 2022, 48(9): 2277−2287 doi: 10.16383/j.aas.c190816
http://www.aas.net.cn/cn/article/doi/10.16383/j.aas.c190816
关键词
多自主水下航行器,事件触发,领航者−跟随者法,动态面控制,固定时间控制
摘要
针对多自主水下航行器编队系统受限于有限的通信资源及收敛速度慢等问题, 提出一种基于事件触发的自主水下航行器固定时间领航−跟随编队控制方法. 首先, 将动态面控制算法与反步法结合, 消除“计算膨胀”问题; 其次, 为节约有限通信资源, 将事件触发通讯机制和固定时间理论引入多自主水下航行器编队控制中, 设计编队控制器, 实现编队系统的固定时间稳定, 且系统收敛时间与初始状态无关, 并通过理论证明无Zeno行为; 最后, 对4艘自主水下航行器的编队进行仿真实验, 验证算法的有效性.
文章导读
随着海洋科学技术的进步, 自主水下航行器(Autonomous underwater vehicle, AUV)在各种水下作业得到广泛应用, 如在海底探测、地形测绘和水下施工等[1-5]. 在复杂作业环境下, 需要多AUVs协同作业, 提升作业效率, 实现性能和指标, 对一致性和编队控制则提出更高的要求. 其中多AUVs编队控制因具有作业范围广、效率高、容错性好等特点成为AUVs系统重点研究方向. 常用编队协调控制方法有领航者−跟随者法[6-8]、虚拟结构法[9]和基于行为控制法[10]等, 其中领航者−跟随者法因其控制简单、编队队形结构实现难度低等优点, 备受科研人员青睐. 此方法是在多AUVs编队系统中指定其中某个AUV为领航者, 其他AUVs则为跟随者, 领航者跟踪预先设定的参考轨迹, 每个跟随者依据和领航者之间的位置误差和速度误差设计控制律, 以一定的间隔距离与角度跟踪领航者, 从而实现期望的编队目标.
多AUVs编队控制是一项具有挑战性的工作. 一方面, 因其系统受限于有限的通信资源, 传统连续时间通信会导致通信资源和能量的浪费. 为了有效的利用通信资源, 事件触发通讯机制[11-12]运用而生. 事件触发控制是指只有当单个智能体的某一个状态变化量超过给定阈值时, 该智能体被触发并与邻居进行信息传输, 此方法能减少系统能耗和控制器的更新次数. 文献[11]针对具有外部干扰的线性多智能体系统, 提出一种分布式事件触发一致性协议, 有效地减轻整个通信网络的通信负担. 文献[12]讨论了高阶多智能体系统在外部扰动作用下的时变编队问题, 提出一种事件触发积分滑模控制策略, 节约了能耗, 且避免触发时间序列的Zeno行为. 文献[13]针对一类非严格反馈的多智能体系统一致性跟踪问题, 在考虑全状态约束和指定性能的基础上提出了一种事件触发自适应控制算法.
另一方面, 编队的收敛速度是多AUVs编队控制中的一个重要性能指标. 理想的编队控制应在足够短的有限时间内完成所需编队. 由于多数AUVs编队控制是渐近稳定的, 基于收敛率的问题, 有限时间[14-16]编队控制的研究提高了系统的收敛速度. 文献[14]研究了基于有限时间扩张状态观测器的水面船舶分布式编队控制问题. 文献[15]考虑具有视线范围和角度约束的自主水面船舶编队问题, 提出了一种容错有限时间领航−跟随编队控制方案. 文献[16]针对存在模型不确定性和环境扰动的欠驱动无人水面船舶编队问题, 提出一种自适应有限时间扰动观测器, 在有限时间内达到既定的编队目标. 基于有限时间的编队控制提高了编队收敛速度, 但其收敛时间取决于系统的初始状态, 而初始状态在实际工程中随机变化, 造成编队的收敛时间的不确定性. 固定时间稳定理论[17-21]不仅可以提高系统收敛速度, 而且其编队系统的收敛时间与初始状态无关, 仅取决于控制器的设计参数, 所以基于固定时间理论的控制器更符合实际系统.
本文同时考虑多AUVs系统受限于有限的通信资源以及编队收敛速度慢等问题, 提出一种基于事件触发的AUVs固定时间编队控制方法. 将分布式事件触发机制引入多AUVs编队控制研究中, 并且基于固定时间稳定构造出触发函数, 设计出基于事件触发的编队控制器, 保证系统全局固定时间有界性收敛, 且收敛时间不受初始状态的影响, 既加快系统的收敛速度, 又通过降低控制器的触发频次和通信次数, 提高对有限通信资源利用率, 节约系统通信能量, 同时证明无Zeno行为; 此外, 在反步法中引入动态面技术避免了“微分爆炸”问题, 降低了控制器的复杂性.

图1 领航−跟随多AUVs编队示意图
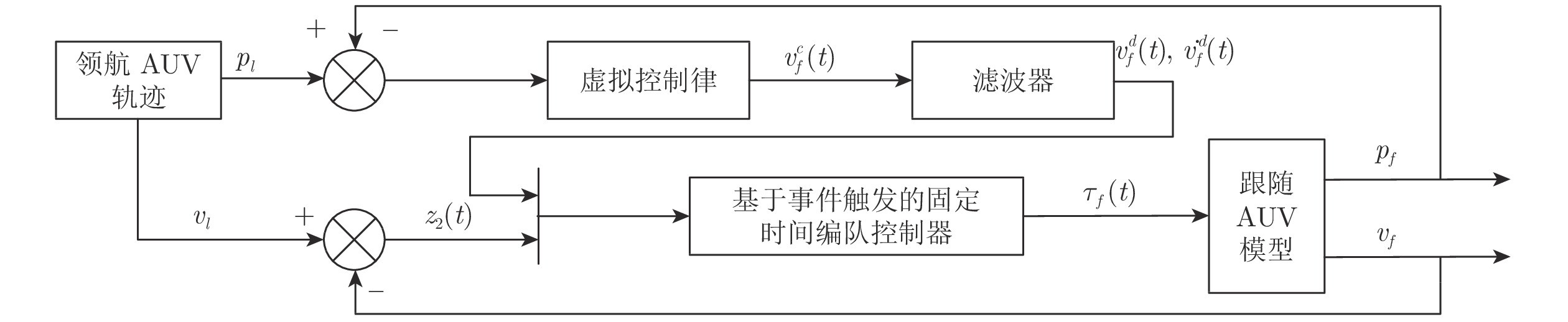
图2 编队跟踪控制示意图
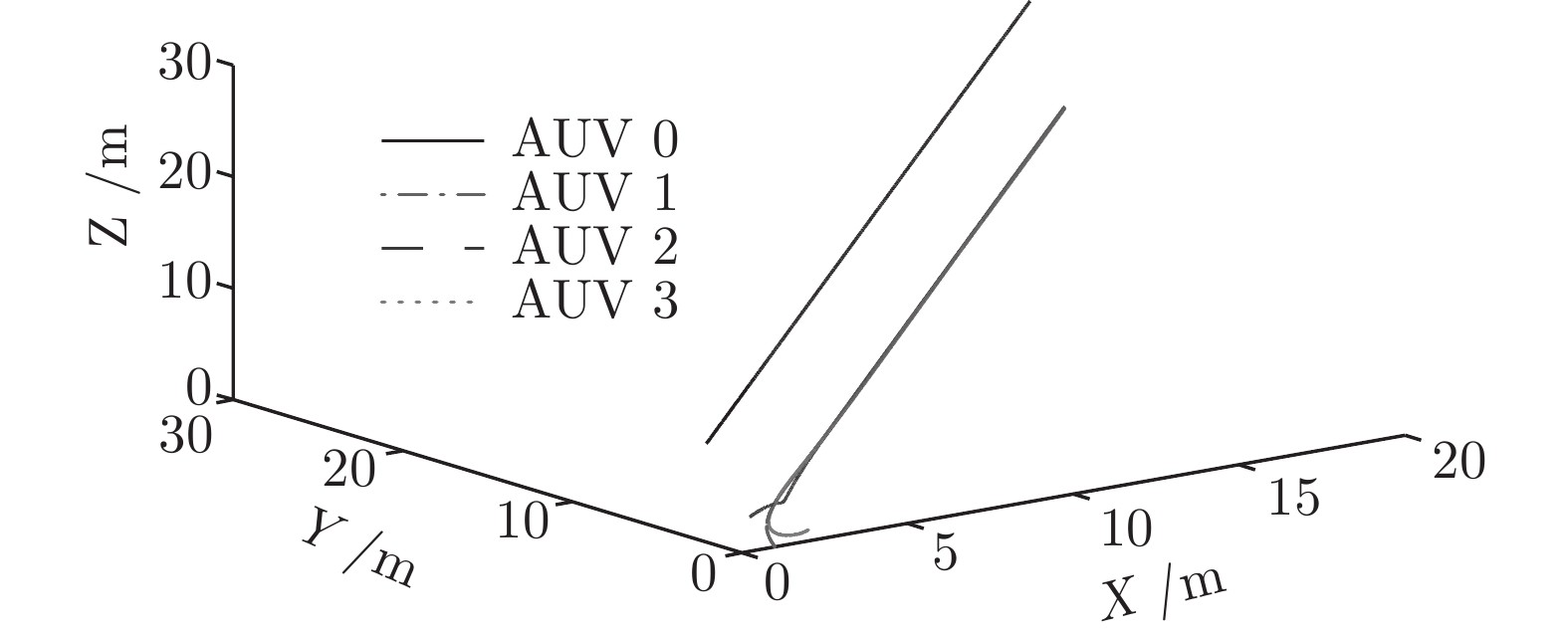
图3 工况 1 下的轨迹
本文提出一种基于事件触发机制的多AUVs固定时间编队控制算法, 同时解决了多AUVs编队系统有限通信资源的限制以及编队收敛速度慢的问题. 基于反步动态面控制算法, 将分布式事件触发通讯机制引入多AUVs领航−跟随编队控制策略中, 根据固定时间控制理论的思想, 构造出事件触发函数, 设计出基于事件触发的编队控制器, 保证编队系统实现全局固定时间收敛. 除了加快系统的收敛速度外, 其收敛时间不受初始状态的影响; 同时通过减少控制器的更新频次和通信次数, 降低系统通信能耗, 提高对有限通信资源的利用率.
作者简介
王洪斌
燕山大学教授. 主要研究方向为过程自动化, 机器人控制技术, 变结构控制系统, 鲁棒控制和视觉伺服. E-mail: hb_wang@ysu.edu.cn
高静
燕山大学电气工程学院研究生. 主要研究方向为自主水下航行器编队控制. 本文通信作者.E-mail: jing1883049@163.com
苏博
燕山大学电气工程学院博士研究生. 主要研究方向为水下机器人非线性控制.E-mail: bosu@stumail.ysu.edu.cn
王跃灵
燕山大学工业计算机控制工程河北省重点实验室讲师, 机械工程学院博士研究生. 主要研究方向为智能控制, 迭代学习控制和自适应控制.E-mail: yuelingw@ysu.edu.cn
https://blog.sciencenet.cn/blog-3291369-1356785.html
上一篇:满足不同交互任务的人机共融系统设计
下一篇:基于样本特征解码约束的GANs