博文
仿生机器人
|||
1. Robert Full:向壁虎尾巴学习-优米网视频
详细介绍见TED http://chuangxin.umiwi.com/2011/0815/29589.shtml
加州大学柏克莱分校生物学家Robert Full深受蟑螂腿的功能所吸引,因为它能让蟑螂全速疾跑于松散的网布上;而有数十多亿根纳米大小细毛的壁虎脚,则能在墙上垂直攀升。他运用自己的研究设计完美的机械“分布式足”,在金属腿上加入尖刺、细毛和其他部分,创造出能够灵活奔跑跳跃的机器。
他还协助创造出如Spinybot之类的机器人,使其可以像壁虎一样攀上垂直的玻璃,他甚至还帮助皮克斯动画工作室,在电影《虫虫危机》中制作更逼真的昆虫动画。
天涯网友也介绍该研究:http://wenda.tianya.cn/wenda/thread?tid=7066781df84093e5
2.Robert Full是伯克利Poly-PEDAL Lab的头,早前了解他与SR I合作开发的Flex2(根据Pelrine在2003年发表的文献:Dielectric Elastomer Artificial Muscle Actuators: Toward Biomimetic Motion),该机器人采用Dielectric elastomer驱动。
![]()
Robert Full其他仿生机器人研究详见:
http://polypedal.berkeley.edu/twiki/bin/view/PolyPEDAL/AboutRobotics
其中Intelligent Inferences Systems Inc.的Mars Walker,MIT Insect Lab.的Boadicea,都是人工肌肉驱动,但是没有找到相关信息。文献中有提到Boadicea,2004年以前发表;没有Mars Walker。
3.视频中Mark R. Cutkosky是斯坦福大学仿生与灵巧手实验室的教授:Bdml,Biomimetics and Dexterous Manipulation Lab,http://bdml.stanford.edu/,其研究工作也围绕壁虎爬行能力展开,相关内容包括仿壁虎机器人、超级胶合剂、触觉技术等,视频中提到的仿壁虎机器人Stickybot见下左图

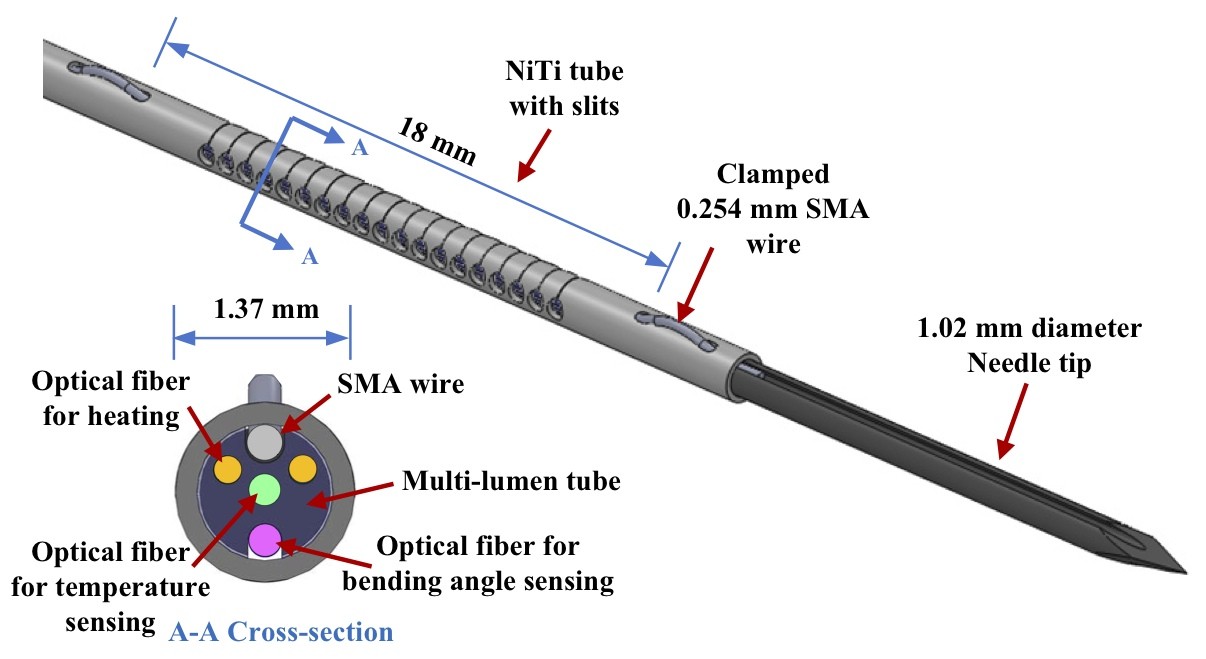
上右图是SMA驱动的用语MRI的活体组织穿针,带撕裂的NiTi管内除了有SMA丝,还嵌入了热、温度和角位移等多种传感光纤,结构巧妙。
4. The Center for Biologically Inspired Robotics Research at Case Western Reserve University也有很多有趣的研究成果,其中仿生蚂蚁让人印象深刻。

相关成果发表在2005年,但是这个实验室制作的机器人大都采用电机驱动。
https://blog.sciencenet.cn/blog-3307-533381.html
上一篇:两种机械手外观
下一篇:压电陶瓷驱动器 PZT Actuator