博文
复杂网络的吸引域估计(Estimating the region of attraction)
|
zhu2019-SIAM.Control.pdf [作者:朱帅兵,周进,陈关荣,陆君安]
复杂网络的吸引域估计-中文介绍.pdf [注:本博文的PDF版本]
复杂网络的吸引域估计
[1] S. Zhu, J. Zhou, G. Chen, and J. Lu, “Estimating the region of attraction on a complex dynamical network,” SIAM J. Control Optim., vol. 57, no. 2, pp. 1189–1208, 2019.
Index Terms: Complex network, region of attraction (ROA), stability, synchronization, equilibrium point.
关键词:复杂网络,吸引域,稳定性,同步,平衡点.
一、引言
1.1 背景介绍. 同步是复杂动力网络中的一个基本问题,包括全局同步和局部同步。近十多年,人们更多地关注全局同步,而对局部同步的研究相对较少。值得注意的是,网络是否同步往往受初始条件的影响,例如对于如下含有2个节点的网络:
$$ \dot{x}_1 = f(x_1)+x_2-x_1, \hspace{3mm} \dot{x}_2 = f(x_2)+x_1-x_2, \hspace{2cm} (1) $$
其中 f(x)=-x+x2。 若初值为 x1(0)=2, x2(0)=3, 网络(1)无法同步到 x1=x2=0, 尽管平衡点 x1=x2=0 是局部渐近稳定的;若 x1(0)=0.2, x2(0)=0.3, 网络(1)同步到 x1=x2=0。现有研究给出了局部同步的一些判据,但是没有给出初值的范围。因此,很有必要研究复杂网络的吸引域(ROA: region of attraction),即能够使得网络同步到某个给定平衡点的初始值的范围。通常,ROA的形状很不规则,只能找出它的尽可能大的子集。
1.2 研究动机. 现有文献中,ROA估计主要集中在两类系统:具有各种约束的线性系统和低维度的非线性系统。复杂网络通常具有高维度,而且节点动力学常常是非线性的,所以现有的一些方法无法直接应用到复杂网络的ROA估计。
1.3 主要贡献.(1)给出网络平衡点渐近稳定的一个充分条件和一个必要条件.(2)给出一般的ROA 估计方法,其中用到了方程解耦技巧以实现降维. 现有的解耦技巧需要假设耦合矩阵对称,我们首次把这一技巧推广到了非对称的耦合矩阵.(3)给出二阶的ROA估计方法。
二、准备工作
2.1 模型与分析. 考虑 N 个 n 维的节点构成的网络:
$$\dot{x}_i = f(x_i)+c\sum\limits_{j=1}^N a_{ij}h(x_j),\ 1\leq i\leq N \hspace{2cm} (2)$$
其中,f, h 连续可微,c>0 为耦合强度,A=(aij)N*N 为耦合矩阵。这里,A 只需满足行和为 0 的条件。令 s 为节点系统 x'=f(x) 的平衡点,则 S=[sT, ..., sT]T∈RnN 是网络(2)的平衡点。平衡点 S 的ROA定义为
$$ R_A = \left\{ X_0 \bigg| \lim_{t\to + \infty} X(t; X_0)=S \right\}, \hspace{2cm} (3)$$
其中 X=[x1T, ... ,xNT]T。我们的目标就是找到 RA 的尽可能大的开子集。定义 ei=xi-s,则误差系统为
$$ \dot{e}_i = f(x_i)-f(s)+c\sum\limits_{j=1}^N a_{ij}(h(x_j)-h(s)) = F_1e_i+c\sum\limits_{j=1}^N a_{ij}F_2e_j+R_i^{(1)}+c\sum\limits_{j=1}^N a_{ij}R_j^{(2)}, \hspace{5mm} (4)$$
其中,F1=Df(s),F2=Dh(s),Ri(1)=f(xi)-f(s)-F1ei,Ri(2)=h(xi)-h(s)-F2ei。Ri(k) 是泰勒展开的余项,也可以看作非线性部分。显然有 ||Ri(k)||=o(||ei||)。如果只研究平衡点的稳定性,可以忽略掉非线性部分Ri(k)。但是,估计ROA需要用到非线性部分Ri(k)。定义
$$\varphi_1(x)=\frac{\|f(s+x)-f(s)-F_1x\|}{\|x\|}, \hspace{3mm} \varphi_2(x)=\frac{\|h(s+x)-h(s)-F_2x\|}{\|x\|}, \hspace{2cm} (5)$$
则 ||φk(x)||=o(1)。(4)也可以写为
$$ \dot{e} = Ze+R^{(1)}+c(A\otimes I_n)R^{(2)}, \hspace{2cm} (6)$$
其中,Z=IN$\otimes$F1+cA$\otimes$F2,e=[e1T, ... ,eNT]T,R(k)=[R1(k)T, ... , RN(k)T]T。记 A 的特征值为 λ1, ... , λN,满足 |λ1|≤ ... ≤|λN|。注意 A 不对称时 λi 可能为复数。
2.2 引理与假设.
引理1. 可微函数 x, V 满足 a||x||2≤V(x)≤b||x||2,a,b>0. 对任意 δ∈(0, δ0), 存在 β>0 满足
$$ \dot{V}(x(t)) \leq -\beta \|x(t)\|^2,\ \mathrm{if}\ \|x(t)\| \leq {\delta} $$
其中 δ0>0。若 ||x(t0)|| < r0=$\sqrt{a/b}$δ0,则 x(t) → 0.
引理2. 设 Ψ 的特征值为 ψ1, ... , ψN。对任意 γ>0,存在矩阵 U∈ CN*N 满足 Ψ=U-1JU,其中

γi=0 或 γ。
引理1可用于估计动力系统的吸引域。引理2可用于解耦高维的方程。当耦合矩阵 A 非对称时, A 可能无法对角化,但是一定可以化为若当型。若当型的次对角线元素为 0 或 1,不利于后续定理的证明。利用引理2,可以将 A 的次对角化为 0 或某指定的 γ。
假设1. (A1) 假设存在正定矩阵 P 和常数 ε>0 满足 PZ+ZTP+εInN ≤ 0。
假设2. (A2) 假设存在正定矩阵 P=diag{P1, ... ,PN} 和常数 ε>0 满足
$$ P_i(F_1+c\lambda_i F_2)+(F_1+c\lambda_i F_2)^H P_i+\varepsilon I_{n} \leq 0. \hspace{2cm} (8)$$
三、主要结果
3.1 稳定性分析.
定理1. 若(A1)成立,则网络(2)的平衡点 S 渐近稳定。
定理2. 若网络(2)的平衡点 S 渐近稳定,则节点系统 x'=f(x) 的平衡点 s 渐近稳定。
定理1和定理2分别给出了网络(2)的平衡点 S 渐近稳定的一个充分条件和一个必要条件。现有文献中也有类似的充分条件,但是很少有文献给出必要条件。若节点系统的平衡点不渐近稳定,则由定理2立即得知网络系统的对应平衡点也不渐近稳定。
3.2 一般的ROA估计.
定理3. 考虑网络(2)。若(A1)成立,则
(a)对 ρ∈(0, 1), 存在正常数 δ0=δ0(ρ) 满足
$$ \varphi_k(x) < \nu_k, \ \forall x\in \mathrm{B}_{\delta_0}\backslash \{0\},\ k=1,2 $$
$\nu_1=\frac{\varepsilon \rho }{2\|P\|}$,$\nu_2=\frac{\varepsilon (1-\rho)}{2c\|P\| \|A\|}$;
(b)$D=\left\{S+Y\left| \right.\|Y\| < r_0 \right\}$是 RA 的子集,$r_0=\sqrt{ \lambda_{min}{(P)}/ \lambda_{max}{(P)} }\delta_0$。
单个节点系统的维度通常比较小,所以一般来说找到定理3中的 δ0 比较容易。显然,δ0 的大小决定了所估计的ROA的大小。参数 ρ 取不同的值,可能得到不同的 δ0。 寻找最优的 ρ 使得 δ0 最大的问题可以描述为
$$ \min -\delta_0, \hspace{3mm} \mathrm{s.t.}\ \varphi_1(x) < \nu_1, \hspace{1mm} \varphi_2(x) < \nu_2, \hspace{3mm} \forall x \in \mathrm{B}_{\delta_0}\backslash \{0\},\ \rho \in (0,1). \hspace{2cm} (9) $$
若 f, h 是线性的,则 φ1=φ2=0,此时 δ0=+∞,D=RnN,即平衡点 S 是全局渐近稳定的。
定理3给出了一种估计网络(2)的ROA的简单方法。然而,当 N 很大时,不太容易找到(A1)中的 P, ε。因此,我们给出另一种估计方法,将(A1)的高维线性矩阵不等式(LMI)分解成了(A2)的 N 个低维的LMI。
定理4. 考虑网络(2)。若(A2)成立,则
(a)存在矩阵 U 满足 A=U-1JU,其中 J 的形式如引理2所示,Jii=λi,Ji,i+1=0 or $\frac{\varepsilon}{4c\|P\| \|F_2\|}$;
(b)对 ρ∈(0, 1),存在正常数 δ0=δ0(ρ) 满足
$$\varphi_k(x) < \nu_k, \ \forall x\in \mathrm{B}_{\delta_0}\backslash \{0\}, $$
$\nu_1=\frac{\varepsilon \rho }{4\|P\| \kappa_2(U)}$,$\nu_2=\frac{\varepsilon (1-\rho)}{4c\|P\| \|A\| \kappa_2(U)}$,$\kappa_2(U)$表示矩阵 U 的条件数;
(c)$D=\left\{S+Y\left| \right.\|Y\| < r_0 \right\}$是 RA 的子集,$r_0=\sqrt{ \lambda_{min}{(P)}/ \lambda_{max}{(P)} } \frac{\delta_0}{\kappa_2(U)}$。
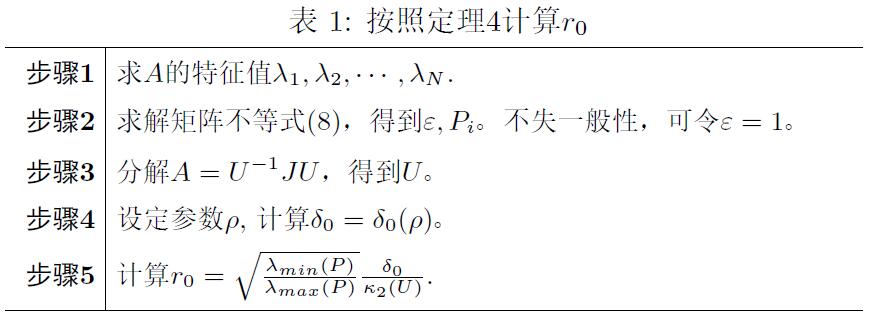
定理4中计算 r0 的步骤如表1所示。定理4给出一种估计网络(2)的ROA的更加复杂但是也更加可行的方法。对于有向网络,耦合矩阵 A 不对称,所以 U 不是正交阵。定理4的估计一般情况下比定理3更保守,因为非正交的 U 使得$\kappa_2(U)$比较大。
推论1. 考虑网络(2),假设其耦合矩阵 A 对称。若(A2)成立,则
(a)对 ρ∈(0, 1), 存在正常数 δ0=δ0(ρ) 满足
$$\varphi_k(x) < \nu_k, \ \forall x\in \mathrm{B}_{\delta_0}\backslash \{0\},$$
$\nu_1=\frac{\varepsilon \rho }{2\|P\|}$,$\nu_2=\frac{\varepsilon (1-\rho)}{2c\|P\| \|A\|}$;
(b)$D=\left\{S+Y\left| \right.\|Y\| < r_0 \right\}$是 RA 的子集,$r_0=\sqrt{ \lambda_{min}{(P)}/ \lambda_{max}{(P)} } \delta_0$。
按照推论1计算 r0 的步骤与表1类似,除了不需要求解 U。推论1看起来和定理3几乎一样,但实际上是不同的。定理3中的 P, ε 通过解(A1)中不等式得到,而推论1则是通过解(A2)中不等式得到。
3.3 二阶ROA估计.
在表1中的步骤4,有时候不太容易确定最优的 ρ 。如果 f, h 二阶连续可微,则可以建立二阶的ROA估计方法,其不需要确定最优的 ρ 。接下来,假设 f, h 二阶连续可微。记
$$ f=[f_1,\cdots,f_n]^T,\ h=[h_1,\cdots,h_n]^T,\ R_i^{(k)}=[R_{i1}^{(k)},\cdots,R_{in}^{(k)}]^T. \hspace{2cm} (10)$$
由于 f, h 二阶连续可微,有
$$ R_{ij}^{(k)}=\int_0^1 (1-\tau)e_i^T \Phi_j^{(k)}(s+\tau e_i)e_i\mathrm{d}\tau, \hspace{2cm} (11)$$
其中$\Phi_j^{(1)},\Phi_j^{(2)}$ 分别是 fj, hj 的Hessian矩阵。假设
$$ \|\Phi_j^{(k)}(s+x)\| \leq \phi_{kj}(r),\ \forall x\in \overline{\mathrm{B}}_{r} $$
其中$\phi_{kj}$连续且非减。记$ \phi_k(r) = \sqrt{ \phi_{k1}^2(r)+ \phi_{k2}^2(r) + \cdots + \phi_{kn}^2(r)}$。
定理5. 考虑网络(2),假设(A1)成立。设 δ0 满足
$$\delta_0 \leq \sup \left\{\delta \in \mathbb{R} \left| \ \delta \|P\| \left(\phi_1(\delta)+c\|A\| \phi_2(\delta) \right) \right.\leq \varepsilon \right\},$$
则$D=\left\{S+Y\left| \right.\|Y\| < r_0 \right\}$是 RA 的子集,$r_0=\sqrt{ \lambda_{min}{(P)}/ \lambda_{max}{(P)} } \delta_0$。
对于ROA估计,很重要的一步是估计非线性部分 R(k) 的上界。一般的ROA估计方法没有给出如何估计 R(k),而二阶的ROA估计方法提供了一种估计 R(k) 的途径。
仿照定理4和推论1,可以建立相应的二阶ROA估计方法。限于篇幅,这里不再一一列出。
四、数值仿真
考虑含有4个节点的有向网络,其中f(z)=(z2, -r1 sin z1-b z2)T,h(z)=(z1+r2 sin z2,z2)T,r1 =1, b=2, r2=0.1,c=0.25,
由于 A 非对称,利用定理4并按照表1的步骤估计平衡点 S=0 的ROA。
限于篇幅,按照步骤1、2、3计算出的相关数据不再一一列出。步骤4中,φk估计如下:
$$ \|\varphi_k(z)\|= \frac{1}{\|z\|} {|r_k||z_{k}-\sin z_{k}|} = \frac{r_k}{\|z\|} (|z_{k}|-\sin|z_{k}|) \leq r_k \left( 1-\frac{\sin\|z\|}{\|z\|} \right),\ k=1,2. $$
为了使 δ0 尽可能大,解如下的最优化问题:
$$ \min -\delta_0, \hspace{3mm} \mathrm{s.t.}\ r_1 \left( 1-\frac{\sin\|z\|}{\|z\|} \right) < 0.0570\rho, \hspace{1mm} r_2 \left( 1-\frac{\sin\|z\|}{\|z\|} \right) < 0.0584(1-\rho), \hspace{3mm} \forall x \in \mathrm{B}_{\delta_0}\backslash \{0\},\ \rho \in (0,1). \hspace{2cm} $$
容易验证${0.0570\rho}/{r_1}={0.0584(1-\rho)}/{r_2}$时, δ0 达到最大。取 ρ=0.9112,得 δ0=0.5625。因此,$D=\{X \left| \right.\|X\| < r_0=0.0906 \}$是 RA 的一个子集。
取初始值$x_i(0)=0.01[i-1,i+1]^T \in D$。 图1中左图显示网络的节点状态收敛到 S=0,与理论结果一致。取初始值$x_i(0)=3.14+0.5i+0.01[-1,1]^T \notin D$。 图1中右图显示网络的节点状态收敛到平衡点$(1,1,1,1)^T \otimes (2\pi,0)^T$而不是平衡点 S=0。这表明初始值不属于估计的吸引域 D 时,节点状态可能不收敛到给定的平衡点。

图1:网络的节点状态$x_{ij}\ (1\leq i\leq 4, 1\leq j\leq 2)$。左图中,初始值为$x_i(0)=0.01[i-1,i+1]^T \in D$;右图中,其中初始值为$x_i(0)=3.14+0.5i+0.01[-1,1]^T \notin D$。
五、结论
本文简要分析了复杂动力网络平衡点的渐近稳定性,并建立了一般的ROA估计方法和二阶ROA估计方法。尽管我们对ROA的估计可能还比较保守,但是我们的方法和结果迈出了研究复杂网络ROA估计的第一步。用其他形状(如椭球)估计ROA可能会得到更好的结果。将来的研究工作包括各种网络模型的ROA估计、对比估计的ROA与精确的ROA、估计不确定复杂网络的鲁棒ROA等。
https://blog.sciencenet.cn/blog-3409638-1170268.html
下一篇:复杂网络拓扑识别的一些新进展(Topology identification of complex networks)