博文
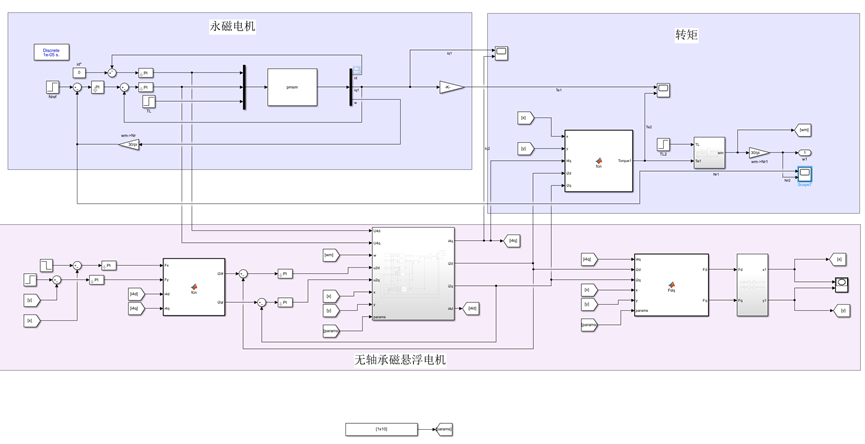
无轴承磁悬浮电机算法仿真
|
Ts=50e-6;
驱动2对极,悬浮1对极,电机参数如下:
R4 =1.91;
L4 =6.5e-3;
R2 =1.80;
L2 =0.0042;
M =0.644;
If =41.08;
psi_f =0.1602;
kr = 238.2;
mr =0.67;
Pn_m =2;
Jtot = 0.244e-3;
B = 0.008;
转速在0.1秒时初始化为1500rpm,负载在0.05秒时初始化为0.32Nm。转子初始位置为[-1mm,0mm],最终控制目标为[10微米,10微米]。
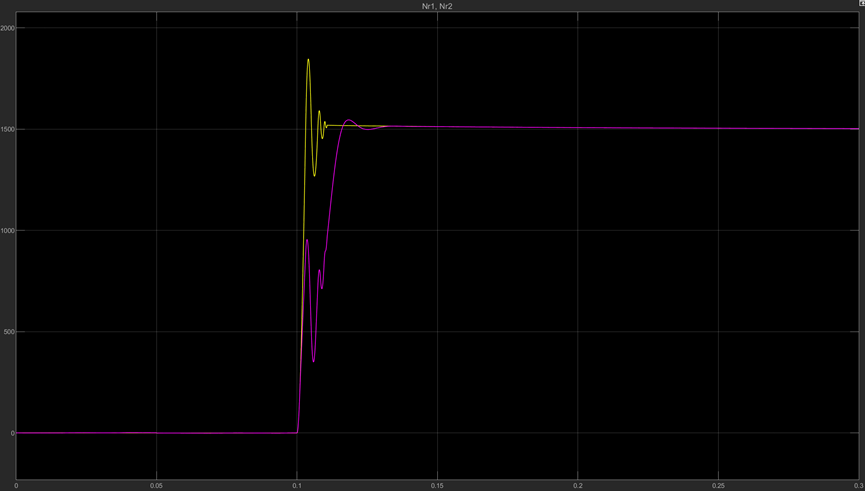
黄色线为无悬浮,粉红色为有悬浮,可见由于悬浮时有偏心的存在,有悬浮转速响应滞后无悬浮转速响应,但稳定时有悬浮和无悬浮都达到1500rpm的设置。
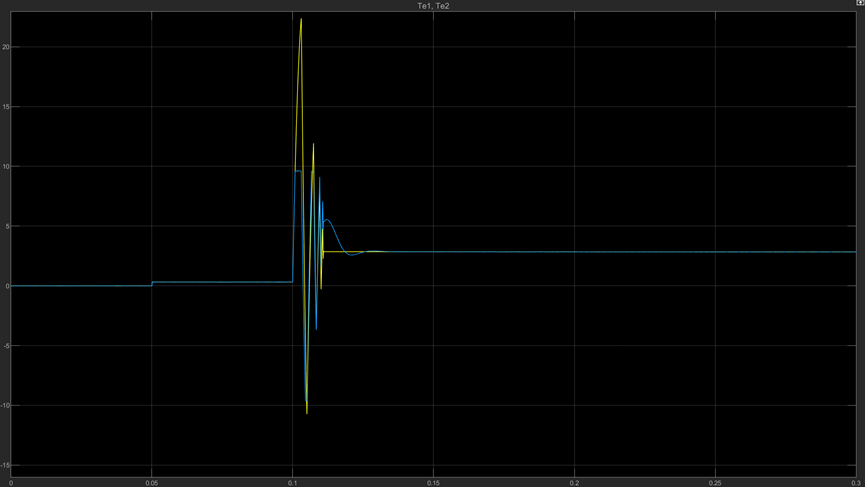
黄色线为无悬浮,蓝色为有悬浮,可见由于悬浮时有偏心的存在,有悬浮转矩响应滞后无悬浮转矩响应,但稳定时有悬浮和无悬浮转矩都稳定在约为2.85Nm。
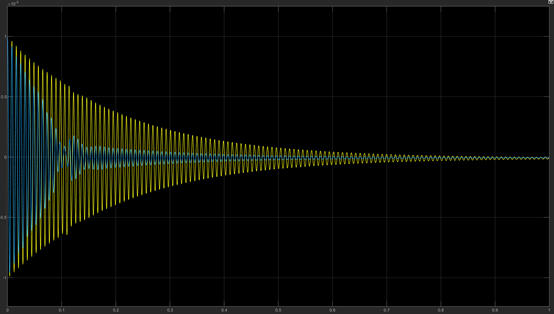
稳定悬浮后,转子偏心控制在10微米以内,完全达到悬浮的精确控制预期目标。

欢迎大家加入交流。
https://blog.sciencenet.cn/blog-54347-1430776.html
上一篇:无轴承同步磁阻电机建模仿真
下一篇:[转载]软件集成:Simulink与STM32联合开发
扫一扫,分享此博文