博文
机器人概述笔记
 精选
精选
||
此章为本书第一篇第一章,介绍了机器人的一些基础概念,一般性的叙述较多,没有太多难以理解的概念和不熟悉的数学知识和其他知识,较易明白。其中较为重要的概念是自由度,指的是描述刚体在三维空间中运动所需要的参数个数,有着很重要的作用,本章仅作了粗略的说明,在机器人的后续章节中会详细介绍。
机器人相关的术语主要有两个,robot和android。robot的术语产生于20世纪,最早出现在1920年捷克剧作家卡雷尔-卡佩克在他的《罗萨姆的万能机器人公司》剧本中,原意为“奴隶机器”。Android最早出现在1886年法国作家维利埃-德利尔-亚当的《未来的夏娃》中,用来称呼具有人形外形的机器,“阿达莉”是书中爱迪生发明的女性外表的机器人。目前关于什么是机器人,如何定义机器人,学术界并没有统一的认识,本章除了对比了现有的几种定义方式外,还从逻辑学上给出了“智能化自动机械”的定义。但实际就机器人概念本身来说,目前大家的认识还是相对困惑的。
自动机械的历史可以追溯到古希腊神话,而真正实用的技术出现在拜占庭和亚历山大时期,出现了自动水钟和自动关门等自动装置。随后随着钟表技术的出现和发展,欧洲文艺复兴时期出现了大量的自动玩偶,这包括机器鸭和会写字弹琴的自动玩偶。这一时期,笛卡尔也发出了“我思故我在”的身心二元论思想,拉美特里发表了《人体机械论》的理论。自动玩偶在19世纪逐渐发展成为文艺和机构两个流派。文艺方面,以德利尔1886年的《未来的夏娃》为代表,出现了好几部描写机器人的著作。机构方面,1893年乔治-莫尔发明的蒸汽人是有记录可查的实际机械。进入20世纪,大量的科幻小说描写了各种各样的机器人,比较有代表性的是《罗萨姆的万能机器人公司》,阿西莫夫一系列的机器人小说和《星球大战》中的C3-PO和R2-D2。其中阿西莫夫提出的机器人三定律对许多作品都产生了重要的影响。20世纪中期,随着计算机技术、自动化技术的发展和原子能的利用,现代机器人正式登上舞台。1947年,美国原子能委员会的阿尔贡研究所发明了遥控机械手,用于处理放射性物质,开启了现代机器人的历史。1948年,维纳出版了机器人控制理论基础之一的《控制论:关于在动物和机器中控制和通信的学科》。1954年,美国的德沃尔第一次提出了工业机器人的设想,并申请了专利,如今,工业机器人已经在各个工业部门得到了广泛的应用。之后的半个多世纪,日本美国、欧洲逐渐成为机器人的研究和开发中心。
根据机器人的发展历程,机器人主要分为:机械手及工业机器人,减少了空间约束的移动机器人以及仿人形机器人。通过将这三类机器人的功能进行组合,文章得出了机器人的功能,主要分为操作功能、移动功能、控制功能和传感器功能。文中的此小节标题是机器人的构成及功能,但文中的内容介绍却一直写的是机器人的功能构成,语义上有些许差别,个人感觉还是叫机器人的构成好一些,最后一小段介绍的是机器人的自由度,明显不能称为构成或者功能,有待调整。

图 1 机器人的功能构成
机器人的操作功能(或者叫机构)包含机械臂(操作机)和手部(原文为末端执行器),是真正执行任务和与环境进行直接交互的功能部件,可以把这部分与人类的上肢相比。当然,根据任务和环境的不同,操作机构的功能要比人的上肢简单甚至更复杂(未来)。对此部分的研究需要用到力学和运动学的知识,本章最后介绍的自由度的概念对机器人操作也有着重要的作用。
移动机构/功能根据环境和目的不同,分为车轮履带式、脚和腿式以及特殊移动式。车轮和履带属于连续接触式移动机构,车轮效率高,移动速度快,主要用在比较平整的路面,履带能够跨越相对复杂的地面,主要用在不平整的地面;腿和脚属于非连续式移动机构,有模仿人和动物,利用旋转关节的机构,也有使用旋转关节和滑动关机形成的机构;特殊移动机构包括模范蛇类的爬行机构、模仿鸟类分析的扑翼机构和模拟鱼游动的机构。
机器人的控制机构是控制机器人的核心机构,是机器智能产生的场所,文中按照工业机器人的观点将其分为系统控制部、作业控制部、动作控制部和伺服机构,有点偏颇,不过倒也能代表智能服务机器人的控制机构。系统控制部相当于机器人的操作系统,负责初始化系统,装载程序指令,管理下层功能,处理传感器传递的信息和信号;作业控制部将机器人语言表示的任务程序进行解释,并将必要的信息传递给动作控制部,按照预定的条件和步骤进行工作;动作控制部按照控制部的信息产生轴的目标值(坐标变换)以实现腿和操作机的运动轨迹;伺服部是机器人机构的各轴按照目标值运动的反馈控制器。

图2 机器人控制装置的功能
传感器是机器人感知外界环境和自身的装置,分为内传感器和外传感器。内传感器包括对自身倾角,关节角度的检测,以及对自身速度和位置的检测;外传感器包括视觉、触觉、力觉、听觉和接近觉等传感器,类似人类的五官,为机器人提供对外界环境的感知。
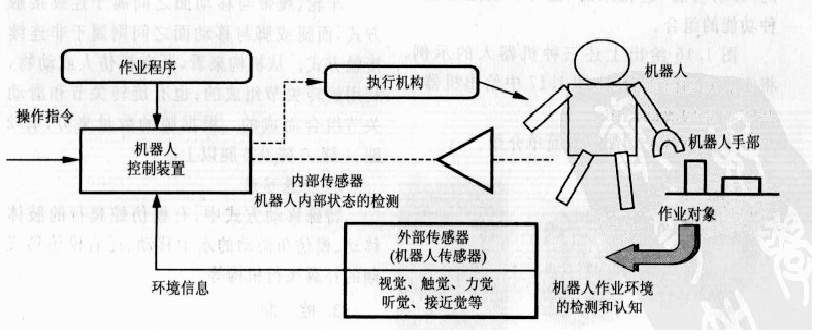
图 3 机器人传感器的布置
以上为本章的主要内容。下图是用思维导图的本章知识图谱(笔记概要)。

人工智能和现代机器人差不多同时发展(人工智能还稍微早一点,1943年),但由于各自要解决的问题不同(人工智能侧重与智能,而机器人侧重于感知和运动技能),采取了不同的数学工具,发展了不同的理论,早期这两者并未有太多的融合。在最近的20年,由于计算机技术的发展,处理器和内存的增加,能够实现计算机的小型化,机器人系统才逐渐在一些需要复杂智能的环境下采用了人工智能相关的理论和技术来处理复杂的环境。可以预见,随着智能机器人的发展,人工智能方面的成果将越来越多的应用到智能机器人系统中。只是不知道未来人类是否会通过阿西莫夫的小说中所描述的那样,通过正电子脑来最终达到强智能。
https://blog.sciencenet.cn/blog-862004-655965.html
上一篇:契子
下一篇:人工智能笔记—第一部分(绪论及智能化智能体)