博文
人工智能笔记—第一部分(绪论及智能化智能体)
 精选
精选
||
之前看过《怎样阅读一本书》,里面介绍不同种类书的阅读和笔记的方法,结合自己的经验,若是希望效果好,可先通读一遍,然后在精度一遍,基本上能掌握书的80%(但此法所费精力较多,需要再考虑摸索)。不过之前阅读财经类的畅销书时贪多务杂,大多数书读完一遍之后,就束之高阁,放在一边了,作者的思想基本过一下脑子就忘了。虽然读得多,但收获缺少,需要好好检讨一下。关于如何在一个领域精深学习,《一万小时天才定律》一书提出了一个公式:天才=激情+伯乐+1万小时精深练习。书中对于这个公式给了一个不算证明的科学证据,也可以叫脑神经基础。人对某项技能和知识的熟练程度取决于脑中髓鞘质的多少和粗细,练得越多,与该项技能和知识相关的髓鞘质就越粗壮。这应该不是一个严格的相关性,但多少说明了精深练习的必要性,这我们在生活中和直觉上都还是能理解。
言归正传,还是回到笔记本身上来。《人工智能:一种现代方法》是人工智能领域的经典教材,不似《新版机器人技术手册》已经绝版,目前手上有第二版的中文版、第二版习题英文答案和第三版的英文版,结合起来看应该效果不错,只是所费时间肯定会大大增加。这本书在智能化智能体这个统一框架下对人工智能领域的一些经典问题和算法进行介绍。全书分为八个部分,第一部分人工智能,在围绕智能化智能体的概念(能够自己做出决策并进行行动的系统)的基础上提供了对人工智能事业的概览;第二部分问题求解,集中讨论了需要提前思考若干步骤时决定要做什么的方法(如地图导航,国际象棋等);第三部分,知识与推理,讨论了世界的知识的表示方式(世界如何运转,当前是什么样子,智能体的行为可能会产生什么影响),以及如何使用这些知识进行推理;第四部分,继续讨论了如何利用这些推理方法来决策要做什么,特别是通过构造规划的方法;第五部分,不确定知识与推理,集中讨论当前世界中存在不确定因素时的推理与决策;第六部分,学习,描述了如何为智能体的决策元件生成所需知识的方法;第七部分,通讯、感知与行动,描述了智能化智能体感知环境的方式,以便了解正在进展的情况(视觉、触觉、听觉、语言理解),并将它的规划转换为实际行动(机器人的工作或者语言输出);第八部分,结论,分析了人工智能的过去与未来,以及其哲学和伦理含义。本文即是对第一部分的笔记。
一、人工智能概念
在对一门新的学科进行学习和研究前,必须明白该学科要研究的问题和它的发展历程,才能找到正确的道路。如同在《I,robot》中威尔·史密斯扮演史普纳问对问题才能获得郎宁博士预留的信息一样,我们也必须提对问题,要弄明白人工智能研究和解决的问题是什么,才能开启人工智能的大门。这里我们提出以下三个问题:
1 什么是人工智能呢?
2为什么要研究人工智能呢?
3人工智能都研究些什么呢?
接下来将一一解答。
人工智能,顾名思义,就是人造的智能。这里又要问些问题,什么是我们所说的智能?只是指人的智能吗?在百度百科中查到:从感觉到记忆到思维这一过程,称为“智慧”,智慧的结果就产生了行为和语言,将行为和语言的表达过程称为“能力”,两者合称“智能”,将感觉、去记、回忆、思维、语言、行为的整个过程称为智能过程,它是智力和能力的表现。它们分别又可以用“智商”和“能商”来描述其在个体中发挥智能的程度。而书中对此是这样叙述的:“我们一直试图理解我们怎么思考…怎能能够感知、理解、预测和应对一个比自身复杂得多和大得多的世界…AI…它不仅理解智能,还想建造智能实体”。可见,人工智能中的智能主要是指人类的智能。这也是可以理解的,人类智能是我们已知的智能体中(如动物的智能)最为复杂和能力最高的,我们要研究、构建智能实体,以人类智能显然要比研究动物的简单智能要有意义得多。
人工智能是最为新兴的学科,现在一般认为人工智能最早工作是1943年Warren McCulloch和Walter Pitts提出可计算函数的人工神经元网络,发展时间并不长,但对科学以及人类社会的意义却不可小觑。人工智能研究的一些子领域已经取得了不少成果,产生了巨大的经济和社会效应。如机器视觉领域的一些成果被广泛运用到制造业、智能监控的领域,借由信息检索领域的技术更是诞生Google这样的企业,未来的智能机器人将会给人类社会带来更大的变化。
人工智能的定义一般可以从思维/行动,类人/理性两个维度来思考,有类人思考、类人行动、理性思考、理性行动四类,如下图所示。类人思考方法是研究人类思维模式和认知模式,更多的是属于认知科学的范畴;类人行动方法是考虑智能体是否能够做人类能做的事情,最有名的当属图灵测试;理性思考方法以一些理性法则来构造智能体;理性行动方法是指在当前环境和条件下,系统能做最正确的事情。本书就是采用理性行动的角度来讲述人工智能的,因此其研究内容就是智能化智能体的设计,包括理性智能体的通用原则及构成智能体的组件的研究。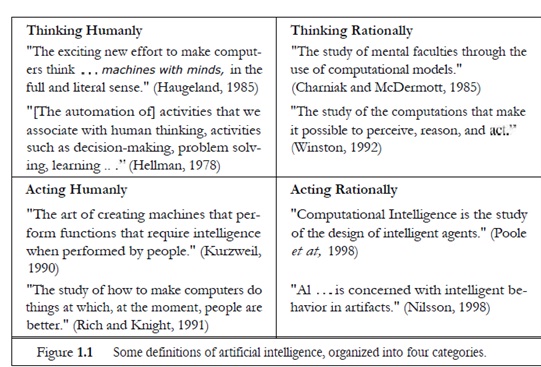
图 1 人工智能定义
人工智能,确切来讲是计算智能(实现载体是计算机,计算机的本质就是实现二进制的计算,人工智能使用的工具也是以数学为核心),正式诞生于1956年Dartmouth College会议,吸收了哲学、数学、经济学、神经科学、心里学、计算机科学、控制论、语言学方面的成果,如今已经发展成为一门重要的科学。哲学提出了可以在某些方面,将人的思维可以看作机器;数学提供了处理确定性和不确定性的工具,也为了理解计算和推理有关算法打下了基础;经济学形式化了理性决策的相关问题;神经科学发现了人脑的部分工作原理以及和计算机的一些异同;心理学提供了将人和动物都看作信息处理机的想法;计算机工程提供了实现人工智能的强有力的工具;控制论提供了设计能与环境进行反馈的机器的相关工具。
本章延伸阅读包括图灵的《计算机器与智能》和冯洛伊曼的《计算机与人脑》。计算机其与智能是图灵对计算机和人工智能的关键问题的思考,计算机与人脑是冯诺伊曼对计算机和人脑的对比。这两位对计算机的诞生有着重要贡献的科学家都对计算机和人类的智能做了一定的研究,不知道是不是不约而同,但是从历史角度去看还是一件蛮有意思的事情。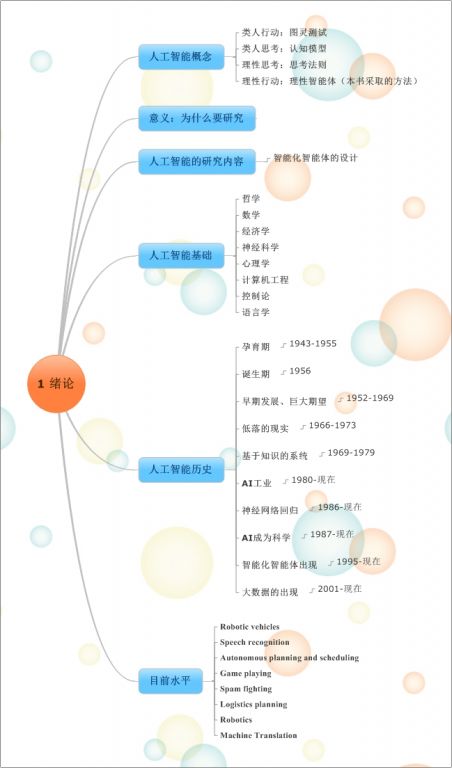
图 2 绪论知识结构
二、智能化智能体
智能化智能体是本书的核心概念,本书作者在前言中曾提到:“本书的统一主题是智能化智能体的思想”。 本书的目的就是通过讨论理性的概念,并通过这个概念开发一组设计智能体原则以构建在某种程度上智能的成功的智能体。因此,理解智能化智能体的概念能够为后续的学习打下基础,可以将各个人工研究的各个子领域统一在智能化智能体的框架下。本章介绍了智能体的特性,理性度量,环境多样性以及由此产生的智能体的类型。
智能体能够通过感知器输入的感知序列感知外界环境和通过执行器执行动作。智能体包括执行器、感受器以及将感知序列转化为执行动作的智能体函数。这里涉及到的概念包括感知信息(percept)、感知序列(percept sequence)、智能体函数(agent function)和智能体程序(agent program)。我们可以将智能体函数简单的看作是感知序列集合到执行动作集合的映射,智能体可以根据当前输入的感知序列从智能体函数中选取动作。可以证明,直接查找智能体函数表来实现智能体是不明智的。通常,一个智能体通过智能体程序来实现智能体函数。智能体函数是抽象的数学描述,智能体程序是在物理实体上运行的智能体函数实现。

图3 智能体通用结构
认识了智能体的概念后,我们来讨论另一个概念,好的行为:理性(本书第三版中理性一节与第二版有所不同,第三版将性能度量和理性合并为一个小节)。一个理性的智能体总是做最正确的行动,而行动的正确性要通过环境的状态来衡量。当一个智能体处于一个环境中时,它会根据接收到的感知信息产生一系列的活动,而这些活动会让环境产生一系列的状态,如果这些状态都是期望得到的,那么这个智能体的行为就是正确的。性能度量(performance measure)就是来衡量这一系列的环境状态是否是期望得到的。
判断一个智能体是否理性取决于定义成功标准的性能度量、智能体对于环境的先验知识、智能体能够完成的动作以及智能体接收到的感知信息。因此,理性智能体的定义就是:对于任意感知序列,智能体能够根据接收到的感知序列和对环境的先验知识选择使性能度量期望最大化的行动。
在定义中,一个智能体要是期望最大化,必须要收集环境的信息和进行学习,智能体才能有自主性。同时要区分一个智能体和全知者的区别。全知者是指能够让实际性能最大化,智能体是指能是期望性能最大化。这里的全知者能够知晓一个动作的实际结果,例如要预测到过街时会被空中掉下的花瓶砸中,这通常是不可能的。智能体并不需要完全理性。
我们定义了什么是理性,如何衡量一个智能体是否智能后,还需要对智能体所处的任务环境进行描述,并根据任务环境的情况确定智能体的设计。任务环境的说明采取PEAS的方式进行描述。PEAS指的是性能度量、环境、感受器、执行器。对任务环境进行描述后,需要再对任务环境的属性进行研究才能决定智能体的设计。任务环境的属性有可观察性与不可观察性、单智能体和多智能体、确定性与随机性、片段性和顺序的、离散的和连续的、可知和不可知这六种(第三版将多智能体放到了第二位)。
AI的重要任务就是实现智能体程序,智能体程序是运行在一定的体系结构上。这里的体系结构是指智能体的感受器、执行器和承载这些机构的结构。
智能体=智能体程序+智能体体系结构
书中的智能体程序的输入为感知器的感知信息,输出为需要发送给执行器执行的动作。智能体程序分为简单反射型智能体、基于模型的反射智能体、基于目标的智能体和基于效用的智能体。简单反射型智能体直接响应感知信息,基于模型的智能体需要在内部维护外部世界的状态,基于目标的智能体需要完成目标,基于效用的智能体总是希望最大化自己的效用。
学习型智能体不是单独的智能体类型,上述的智能体都可以通过增加学习相关的元件改造为学习型智能体。学习型智能体包含执行元件、学习元件、评价元件和问题产生器,其他智能体在改造时,只需要加上学习元件、评价元件和问题产生器即可。执行元件可以看作其他智能体的智能体程序,主要负责接收感知信息并选择动作;学习元件使用评价元件对智能体动作的评价反馈,决定应该对执行元件做出什么改进;评估元件评估智能体当前动作是否符合性能标准,并将结果反馈给学习元件;问题产生器负责做出可能产生新的有价值的经验的动作建议。下图为学习型智能体的结构。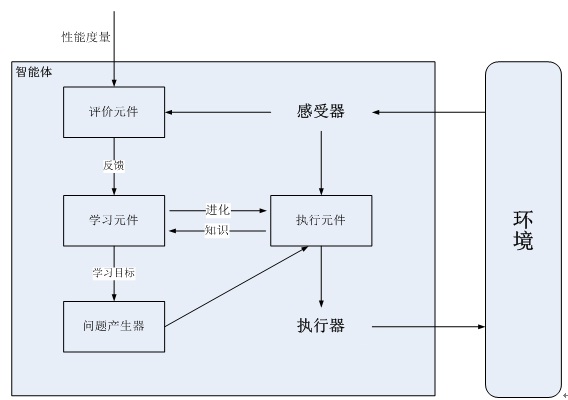
图 4 学习型智能体结构
下面我们来总结一下设计智能体的通用过程:
1 确定性能度量
2 描述任务环境,分析环境属性
3 确定智能体体系结构
4 设计智能体程序
根据智能体要完成的任务和设计目的的不同,接下来的实现智能体工作将有很大的差别。如实现火星登陆的智能体和私人助理智能体等,在此不再详细探讨。下图为智能化智能体一章的知识大纲。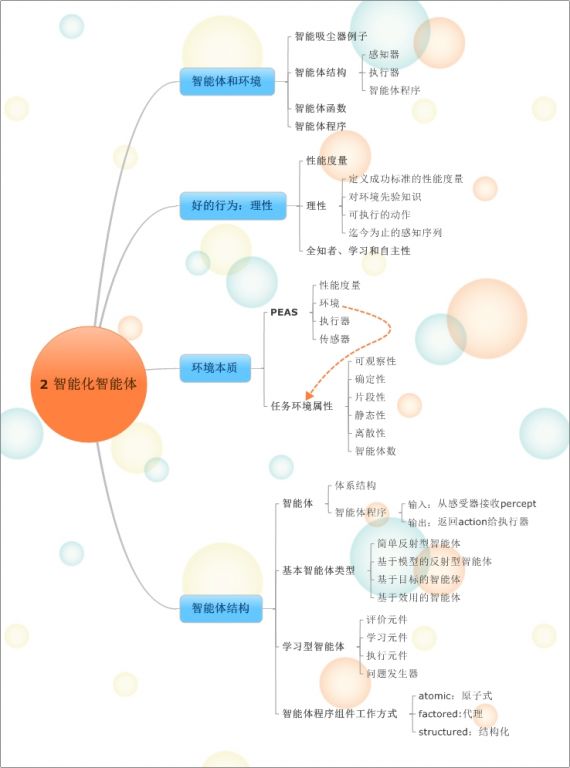
图5 智能化智能体知识结构
https://blog.sciencenet.cn/blog-862004-657725.html
上一篇:机器人概述笔记